

5. Система стабилизации тангажа самолета
С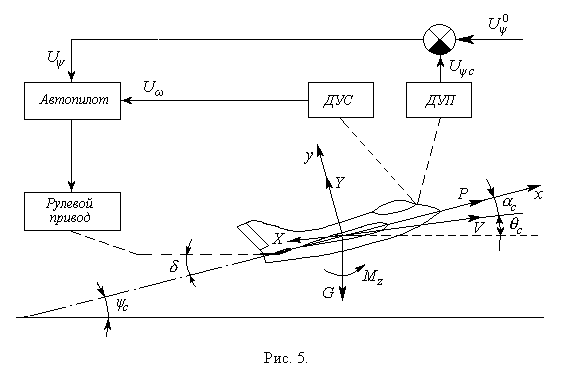 истема
предназначена для стабилизации движения
самолета по тангажу. Функциональная
схема изображена на рис.5.
истема
предназначена для стабилизации движения
самолета по тангажу. Функциональная
схема изображена на рис.5.
На
схеме обозначено: Х
сила лобового сопротивления; Y
подъемная сила; G
сила тяжести; М
суммарный момент, приложенный к самолету
относительно оси z;
Р
сила тяги;
![]()
угол наклона траектории;
угол наклона траектории;
![]()
углы атаки и тангажа; V
вектор скорости.
углы атаки и тангажа; V
вектор скорости.
Бортовая система управления по каналу тангажа включает датчики информации, автопилот, выполняющий функцию регулятора, и привод рулей высоты. В качестве датчиков информации используются датчик углового положения (ДУП) и датчик угловой скорости (ДУС).
Сигнал
с ДУП в виде напряжения
![]() ,
пропорционального действительному
значению угла тангажа самолета
,
пропорционального действительному
значению угла тангажа самолета
![]() ,
сравнивается с напряжением задатчика
,
сравнивается с напряжением задатчика![]() ,
так что на
автопилот поступает напряжение
,
так что на
автопилот поступает напряжение
![]() ,
пропорциональное отклонению y
угла тангажа от требуемого значения.
Сигнал с ДУС представляется напряжением
,
пропорциональное отклонению y
угла тангажа от требуемого значения.
Сигнал с ДУС представляется напряжением
![]() ,
пропорциональным угловой скорости
самолета
,
пропорциональным угловой скорости
самолета
![]() ,
относительно поперечной осиz.
,
относительно поперечной осиz.
Уравнения возмущенного движения самолета, линеаризованные относительно некоторого режима полета, имеют вид [3]

где
отклонение угла атаки от номинального
значения;
отклонение угла поворота руля высоты;
f
приведенное внешнее возмущение
(безразмерная величина), природой
которого могут быть вертикальные
составляющие порывов ветра, сброс груза,
находящегося не в центре тяжести самолета
и др.;
![]() -
параметры самолета.
-
параметры самолета.
Система
работает следующим образом. При действии
внешнего возмущения f
изменяется суммарный момент
![]() ,
что приводит к изменению угла тангажа
самолета и появлению сигналов
,
что приводит к изменению угла тангажа
самолета и появлению сигналов![]() с датчиков информации. По этим сигналам
в автопилоте формируется управляющее
напряжениеи
на рулевой
привод, который изменяет угловое
положение руля высоты так, что возникающий
при этом аэродинамический момент
компенсирует изменение момента
с датчиков информации. По этим сигналам
в автопилоте формируется управляющее
напряжениеи
на рулевой
привод, который изменяет угловое
положение руля высоты так, что возникающий
при этом аэродинамический момент
компенсирует изменение момента
![]() ,
и угол тангажа самолета становится
близким к заданному.
,
и угол тангажа самолета становится
близким к заданному.
Исходные данные для проектирования приведены в таблице 5.
Примечания:
1.
В качестве объекта управления принять
самолет и рулевой привод. При этом привод
считать безинерционным звеном с
коэффициентом передачи
![]() .
.
2.
При анализе системы считать, что внешнее
возмущение
![]() носит ступенчатый характер.
носит ступенчатый характер.
Таблица 5
|
№ варианта |
Показатели качества |
Параметры самолета |
Коэффициент передачи рулевого привода
|
Параметры измерителей |
Внешнее возмущение
| ||||||||||
|
Ошибка стабилизации
|
Время регулирования
|
Показатель колебательности
|
Радиус устойчивости
|
|
|
|
|
|
|
|
ДУП
|
ДУС
| |||
|
1 |
0.5 |
3.0 |
1.1 |
- |
0.105 |
0.63 |
3.63 |
0.645 |
3.4 |
1.3 |
1.27 |
1.5 |
0.7 |
1.2 |
2 |
|
2 |
0.6 |
2.0 |
- |
0.8 |
0.28 |
1.0 |
5.56 |
0.88 |
16.0 |
1.3 |
1.6 |
1.6 |
0.6 |
1.3 |
2 |
|
3 |
0.5 |
4.0 |
1.2 |
- |
0.207 |
0.92 |
4.26 |
0.58 |
2.9 |
1.2 |
1.2 |
2.0 |
0.5 |
0.8 |
5 |
|
4 |
0.4 |
4.0 |
- |
0.7 |
0.47 |
1.2 |
3.67 |
1.0 |
4.48 |
1.3 |
1.5 |
1.2 |
0.8 |
1.3 |
4 |
|
5 |
0.6 |
2.0 |
1.3 |
- |
0.22 |
0.8 |
4.0 |
0.8 |
5.1 |
0.25 |
0.25 |
0.8 |
1.2 |
1.4 |
8 |
|
6 |
0.7 |
4.0 |
- |
0.8 |
0.82 |
1.5 |
6.81 |
0.71 |
5.3 |
1.0 |
1.5 |
0.6 |
1.3 |
1.5 |
5 |
|
7 |
0.8 |
3.0 |
1.2 |
- |
0.23 |
1.8 |
5.0 |
0.62 |
9.4 |
1.2 |
1.2 |
1.0 |
1.0 |
1.5 |
7 |
|
8 |
0.5 |
3.0 |
- |
0.9 |
0.51 |
1.75 |
6.38 |
0.71 |
12.3 |
1.0 |
1.0 |
1.3 |
0.6 |
0.8 |
4 |
|
9 |
0.4 |
2.0 |
1.4 |
- |
0.32 |
1.3 |
5.31 |
1.2 |
15.0 |
1.3 |
1.3 |
1.4 |
0.7 |
1.5 |
6 |
|
10 |
0.5 |
3.0 |
- |
0.8 |
0.43 |
1.42 |
7.4 |
0.82 |
14.6 |
1.0 |
1.0 |
1.2 |
0.8 |
2.0 |
7 |
|
11 |
0.9 |
2.0 |
1.3 |
- |
0.52 |
1.8 |
8.52 |
1.5 |
12.4 |
1.5 |
2.0 |
2.0 |
0.5 |
1.2 |
10 |
|
12 |
1.0 |
4.0 |
- |
0.9 |
0.9 |
1.7 |
7.2 |
0.98 |
11.8 |
2.0 |
0.9 |
2.1 |
0.4 |
1.2 |
10 |
|
13 |
0.5 |
2.0 |
1.2 |
- |
0.81 |
2.0 |
9.1 |
1.03 |
7.3 |
0.8 |
3.0 |
1.7 |
0.5 |
1.3 |
8 |
|
14 |
0.4 |
3.0 |
- |
0.85 |
0.71 |
1.1 |
8.1 |
0.91 |
10.8 |
1.1 |
2.0 |
1.1 |
0.9 |
1.6 |
10 |
|
15 |
0.6 |
4.0 |
1.1 |
- |
0.87 |
1.3 |
7.8 |
0.81 |
11.2 |
1.5 |
3.0 |
1.2 |
0.8 |
1.3 |
9 |