

2. Система стабилизации напряжения генератора
Система предназначена для стабилизации напряжения генератора постоянного тока, работающего при изменяющейся активной нагрузке.
Функцианально-принципиальная схема системы представлена на рис.2. Система состоит из генератора постоянного тока Г, якорная цепь которого замкнута на активную изменяющуюся нагрузку RН, приводного двигателя Д, работающего от суммирующего усилителя мощности СУМ, и регулятора Р.
На вход регулятора поступает сигнал, пропорциональный разности
Таблица 1
|
№
варианта
|
Показатели качества |
Параметры объекта |
Параметры измерителей |
Изменение момента сопротивлен. нагр.
| |||||||||||||
|
Ошибка регулирования
|
Время регулирования.
|
Показатель колебательности
|
Радиус устойчивости
|
Индуктивн. О.В. генератора
|
Сопротивл. О.В. генератора
|
Коэф. между э.д.с. генер. и ток. О.В.Г.
|
Индуктивн. якоря двигателя
|
Сопротивлен якоря двигателя
|
Момент инерц. на валу дви гателя
|
Постоянные двигателя |
Коэф. передачи тахогенерат.
|
|
|
| |||
|
|
| ||||||||||||||||
|
1 |
0.7 |
2.0 |
1.2 |
- |
7.5 |
75.0 |
78.0 |
0.6 |
2.0 |
0.022 |
0.35 |
0.21 |
0.3 |
5.1 |
2.5 |
- |
1.2 |
|
2 |
0.5 |
2.0 |
- |
0.8 |
10.5 |
87.5 |
90.0 |
2.0 |
2.5 |
0.02 |
0.31 |
0.2 |
0.2 |
6.2 |
3.8 |
- |
0.6 |
|
3 |
0.6 |
1.5 |
1.3 |
- |
9.5 |
106.7 |
100.0 |
0.36 |
1.6 |
0.021 |
0.7 |
0.19 |
0.4 |
2.5 |
1.0 |
- |
1.2 |
|
4 |
0.4 |
1.5 |
- |
0.75 |
6.8 |
97.0 |
100.0 |
0.9 |
1.9 |
0.033 |
0.42 |
0.25 |
0.2 |
8.4 |
4.2 |
- |
1.1 |
|
5 |
0.5 |
2.0 |
1.4 |
- |
16.8 |
140.0 |
120.0 |
1.4 |
2.4 |
0.016 |
0.31 |
0.18 |
0.3 |
5.6 |
2.7 |
- |
0.5 |
|
6 |
0.7 |
2.0 |
- |
0.78 |
9.8 |
98.0 |
110.0 |
0.98 |
2.8 |
0.015 |
0.25 |
0.25 |
0.3 |
1.6 |
2.5 |
- |
0.62 |
|
7 |
0.4 |
1.0 |
1.28 |
- |
8.2 |
102.5 |
105.0 |
0.8 |
2.0 |
0.01 |
0.28 |
0.15 |
0.35 |
6.4 |
6.4 |
- |
0.4 |
|
8 |
0.5 |
2.0 |
- |
0.82 |
7.3 |
81.2 |
98.0 |
0.73 |
2.5 |
0.02 |
0.41 |
0.21 |
0.41 |
5.6 |
4.7 |
- |
0.85 |
|
9 |
0.3 |
2.5 |
1.3 |
- |
8.7 |
87.0 |
95.0 |
1.6 |
2.1 |
0.03 |
0.38 |
0.22 |
0.31 |
2.7 |
2.7 |
- |
0.5 |
|
10 |
0.6 |
2.0 |
- |
0.85 |
9.8 |
98.0 |
102.0 |
0.42 |
1.5 |
0.016 |
0.25 |
0.13 |
0.25 |
1.8 |
1.6 |
- |
0.6 |
|
11 |
0.7 |
2.0 |
1.4 |
- |
12.3 |
94.6 |
107.0 |
0.72 |
1.8 |
0.043 |
0.35 |
0.28 |
0.2 |
5.4 |
2.4 |
- |
1.7 |
|
12 |
0.8 |
2.5 |
- |
0.73 |
14 |
100.7 |
110.0 |
1.5 |
1.9 |
0.02 |
0.32 |
0.15 |
0.38 |
- |
- |
1.5 |
0.8 |
|
13 |
0.5 |
3.0 |
1.32 |
- |
13.2 |
88.0 |
98.0 |
1.15 |
2.3 |
0.029 |
0.4 |
0.21 |
0.3 |
3.6 |
3.3 |
- |
0.85 |
|
14 |
0.5 |
2.0 |
- |
0.78 |
15 |
122.5 |
130.0 |
1.3 |
2.2 |
0.024 |
0.4 |
0.19 |
0.41 |
- |
- |
1.8 |
0.9 |
|
15 |
0.7 |
2.5 |
1.25 |
- |
12.5 |
125.0 |
130.0 |
0.84 |
2.1 |
0.017 |
0.35 |
0.15 |
0.42 |
7.4 |
5.1 |
- |
0.7 |
з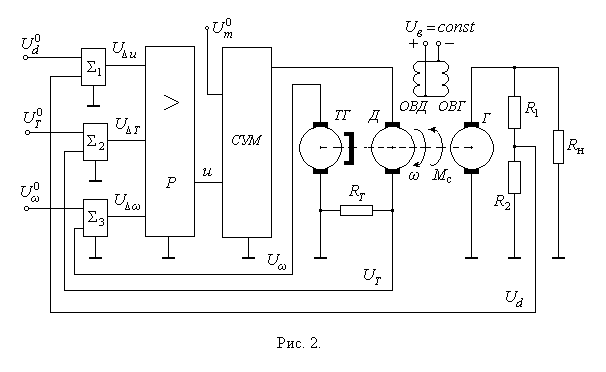 аданного
напряжения стабилизации
аданного
напряжения стабилизации![]() и
действительного напряжения на нагрузке
и
действительного напряжения на нагрузке
![]() ,
измеряемого делителем R1,
R2.
Кроме того, на регулятор могут подаваться
сигналы, пропорциональные отклонениям
скорости и тока якоря приводного
двигателя от заданных значений. При
этом скорость двигателя изменяется
тахогенератором ТГ,
а ток якоря измеряется с помощью резистора
RТ.
,
измеряемого делителем R1,
R2.
Кроме того, на регулятор могут подаваться
сигналы, пропорциональные отклонениям
скорости и тока якоря приводного
двигателя от заданных значений. При
этом скорость двигателя изменяется
тахогенератором ТГ,
а ток якоря измеряется с помощью резистора
RТ.
Система
работает следующим образом. При
номинальной нагрузке
![]() в цепи якоря генератора протекает ток
в цепи якоря генератора протекает ток![]() ,
который обеспечивает напряжение на
нагрузке
,
который обеспечивает напряжение на
нагрузке
![]() ,
равное заданному значению. При этом
э.д.с. генератора
,
равное заданному значению. При этом
э.д.с. генератора
![]() ,
где RG
активное сопротивление якорной цепи,
обеспечивается скоростью вращения
приводного двигателя
,
где RG
активное сопротивление якорной цепи,
обеспечивается скоростью вращения
приводного двигателя
![]() ,
которая в свою очередь определяется
напряжением
,
которая в свою очередь определяется
напряжением![]() ,
снимаемого в этом режиме с суммирующего
усилителя мощности. Значения напряжений
задатчиков выбраны равными по величине
и противоположными по знаку соответствующим
напряжениям измерителей для номинального
режима, так что в этом режиме сигналы
на выходах сумматоров
,
снимаемого в этом режиме с суммирующего
усилителя мощности. Значения напряжений
задатчиков выбраны равными по величине
и противоположными по знаку соответствующим
напряжениям измерителей для номинального
режима, так что в этом режиме сигналы
на выходах сумматоров![]() отсутствуют, и управляющее воздействие
с выхода регулятора равно нулю.
отсутствуют, и управляющее воздействие
с выхода регулятора равно нулю.
При
изменении нагрузки RН
изменяется
ток генератора
![]() .
Это приводит, с одной стороны, к изменению
падения напряжения на внутреннем
сопротивлении генератора, а с другой,
к изменению э.д.с. генератора ЕG
.
.
Это приводит, с одной стороны, к изменению
падения напряжения на внутреннем
сопротивлении генератора, а с другой,
к изменению э.д.с. генератора ЕG
.
Таблица 2.
|
№
варианта
|
Показатели качества |
Параметры объекта |
Параметры измерителей |
Режим стабилизации |
Изменение сопротивления нагрузки
| |||||||||||||
|
Ошибка регулирования
|
Время регулирования
|
Показатель колебательности
|
Радиус устойчивости
|
Сопротивление якоря двигателя
|
Индуктивн. якоря двигателя
|
Момент инерц. на валу дв.
|
Постоянные двигателя и генератора |
Индуктивн. якоря генератора
|
Сопротивлен. якоря генератора
|
|
|
Коэф. передачи тахогенерат.
|
|
|
| |||
|
|
| |||||||||||||||||
|
1 |
0.4 |
2.5 |
1.2 |
- |
4.5 |
1.0 |
0.0105 |
0.28 |
0.21 |
2.0 |
5.0 |
6.4 |
5.1 |
0.4 |
- |
100 |
10 |
5 |
|
2 |
0.5 |
3.0 |
1.15 |
- |
2.2 |
2.0 |
0.022 |
0.35 |
0.31 |
3.2 |
4.0 |
8.1 |
5.1 |
- |
2.7 |
120 |
10 |
6 |
|
3 |
0.6 |
2.5 |
- |
0.8 |
5.1 |
1.5 |
0.0295 |
0.51 |
0.42 |
3.0 |
6.0 |
20 |
10 |
0.2 |
- |
150 |
12 |
7 |
|
4 |
0.4 |
4.0 |
- |
0.85 |
2.8 |
2.5 |
0.033 |
0.42 |
0.32 |
4.0 |
4.5 |
16 |
16 |
- |
2.1 |
100 |
12 |
7 |
|
5 |
0.5 |
2.0 |
1.25 |
- |
4.8 |
1.0 |
0.0175 |
0.48 |
0.35 |
2.0 |
4.8 |
16 |
10 |
0.3 |
- |
120 |
10 |
5 |
|
6 |
0.5 |
2.5 |
- |
0.9 |
5.0 |
1.5 |
0.037 |
0.61 |
0.38 |
2.0 |
8.5 |
16 |
8.2 |
0.2 |
- |
150 |
20 |
10 |
|
7 |
0.3 |
1.5 |
1.3 |
- |
3.5 |
0.8 |
0.0053 |
0.25 |
0.21 |
1.2 |
4.3 |
3.9 |
7.5 |
- |
1.5 |
90 |
8 |
4 |
|
8 |
0.2 |
1.5 |
- |
0.75 |
2.5 |
0.9 |
0.009 |
0.27 |
0.25 |
1.8 |
5.2 |
5.1 |
10 |
- |
2.0 |
60 |
10 |
6 |
|
9 |
0.3 |
2.0 |
- |
0.8 |
4.3 |
1.0 |
0.012 |
0.31 |
0.21 |
2.0 |
4.1 |
5.1 |
5.6 |
0.3 |
- |
80 |
9 |
5 |
|
10 |
0.4 |
1.5 |
1.35 |
- |
3.0 |
1.2 |
0.0138 |
0.41 |
0.35 |
1.5 |
5.1 |
10 |
4.7 |
- |
2.2 |
100 |
12 |
7 |
|
11 |
0.4 |
1.5 |
- |
0.85 |
3.8 |
0.8 |
0.022 |
0.45 |
0.31 |
1.4 |
3.5 |
20 |
10 |
0.2 |
- |
110 |
11 |
6 |
|
12 |
0.5 |
2.0 |
1.2 |
- |
3.2 |
2.0 |
0.0387 |
0.51 |
0.41 |
3.0 |
5.0 |
10 |
5.1 |
- |
2.2 |
120 |
10 |
5 |
|
13 |
0.5 |
3.0 |
1.3 |
- |
5.5 |
1.8 |
0.0305 |
0.48 |
0.35 |
4.0 |
6.5 |
16 |
8.2 |
0.4 |
- |
130 |
15 |
8 |
|
14 |
0.6 |
2.5 |
- |
0.9 |
6.0 |
2.4 |
0.0437 |
0.52 |
0.42 |
4.0 |
6.1 |
10 |
6.4 |
0.3 |
- |
120 |
12 |
7 |
|
15 |
0.4 |
2.0 |
1.25 |
- |
2.0 |
1.5 |
0.0354 |
0.48 |
0.41 |
3.0 |
4.8 |
10 |
5.1 |
- |
3.0 |
110 |
10 |
5 |
Последнее
обусловлено тем, что э.д.с. ЕG
и создаваемый генератором момент
сопротивления
![]() на валу двигателя пропорциональны
скорости двигателяw
и току генератора
на валу двигателя пропорциональны
скорости двигателяw
и току генератора
![]() соответственно, т.е.
соответственно, т.е.![]() ,
где
,
где![]() – постоянные генератора.
– постоянные генератора.
Таким
образом, изменение нагрузки
![]() приводит к изменению всех переменных
объекта управления, и в том числе
напряжения
приводит к изменению всех переменных
объекта управления, и в том числе
напряжения![]() ,
от своих номинальных значений. В
результате на выходах сумматоров
появляются напряжения, пропорциональные
этим отклонениям, по которым в регуляторе
формируется управляющее напряжениеu.
Под действием суммарного напряжения
,
от своих номинальных значений. В
результате на выходах сумматоров
появляются напряжения, пропорциональные
этим отклонениям, по которым в регуляторе
формируется управляющее напряжениеu.
Под действием суммарного напряжения
![]() скорость приводного двигателя обеспечивает
новое значение э.д.с. генератора, и
напряжение на нагрузке становится
близким к заданному.
скорость приводного двигателя обеспечивает
новое значение э.д.с. генератора, и
напряжение на нагрузке становится
близким к заданному.
Исходные данные для проектирования приведены в таблице 2.
Примечания:
1. В качестве объекта управления в этой системе принять систему двигатель-генератор (Д-Г) совместно с усилителем мощности (СУМ).
2.
Считать СУМ
по управляющему входу пропорциональным
звеном с коэффициентом передачи
![]() .
.
3.
При составлении математической модели
и при анализе системы принять, что
изменение нагрузки
![]() носит ступенчатый характер и является
отрицательным, так что полное сопротивление
в цепи якоря генератора после изменения
носит ступенчатый характер и является
отрицательным, так что полное сопротивление
в цепи якоря генератора после изменения
![]() составит
составит
![]() .
.
4. При анализе и синтезе данной системы использовать описание объекта управления в отклонениях от номинального режима.