

3. Система стабилизации крена управляемого снаряда
Система предназначена для стабилизации управляемого снаряда по крену. Схема снаряда с принятыми обозначениями изображена на рис.3.
Если рассматривать вращение снаряда, как твердого тела вокруг продольной оси х, то уравнение движения можно записать в виде:
![]() ,
,
где
![]() –
момент инерции снаряда относительно
продольной оси;
–
момент инерции снаряда относительно
продольной оси;
![]() – угловая
скорость вращения вокруг оси x;
– угловая
скорость вращения вокруг оси x;
![]() – момент
внешних сил, прикладываемых к снаряду
относительно оси x;
– момент
внешних сил, прикладываемых к снаряду
относительно оси x;
![]() –
аэродинамический момент, обусловленный
поворотом элеронов на угол .
При этом момент
–
аэродинамический момент, обусловленный
поворотом элеронов на угол .
При этом момент
![]() зависит как от угла поворота элеронов,
так и от угловой скорости вращения
снаряда, т.е.
зависит как от угла поворота элеронов,
так и от угловой скорости вращения
снаряда, т.е.
![]() ,
,
где
С
и
![]() – коэффициенты пропорциональности,
причем
– коэффициенты пропорциональности,
причем![]() – называется эффективностью элеронов,
а отношение
– называется эффективностью элеронов,
а отношение
![]()
представляет собой постоянную времени
снаряда при движении по крену.
представляет собой постоянную времени
снаряда при движении по крену.
С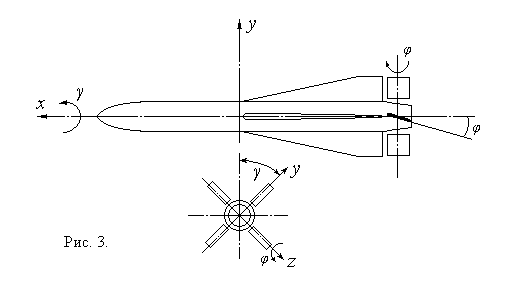 истема
работает следующим образом. При действии
на снаряд внешнего возмущающего момента
истема
работает следующим образом. При действии
на снаряд внешнего возмущающего момента
![]() относительно продольной оси начинает
изменяться угол крена .
С датчика угла, в качестве которого
используется гировертикаль, появляется
электрический сигнал рассогласования
между текущим значением угла крена и
некоторым заданным. Этот сигнал поступает
на регулятор, который вырабатывает
управляющее воздействие на привод для
элеронов. Элероны, поворачиваясь на
некоторый угол ,
создают аэродинамический момент
относительно продольной оси начинает
изменяться угол крена .
С датчика угла, в качестве которого
используется гировертикаль, появляется
электрический сигнал рассогласования
между текущим значением угла крена и
некоторым заданным. Этот сигнал поступает
на регулятор, который вырабатывает
управляющее воздействие на привод для
элеронов. Элероны, поворачиваясь на
некоторый угол ,
создают аэродинамический момент
![]() ,
направленный противоположно внешнему
возмущающему моменту, так что снаряд
приобретает крен, близкий к заданному.
,
направленный противоположно внешнему
возмущающему моменту, так что снаряд
приобретает крен, близкий к заданному.
Кроме основного сигнала с гировертикали на регулятор могут подаваться также сигналы с датчика угловой скорости вращения относительно оси x и с датчика положения элеронов.
Исходные данные для проектирования приведены в таблице 3.
Таблица 3
|
№ варианта
|
Показатели качества |
Параметры объекта |
Коэффициенты передачи измерителей |
Внешний возмущающий момент
| |||||||||
|
Ошибка регулирования
|
Время регулирования
|
Показатель колебательности
|
Радиус устойчивости
|
Эффективность элеронов
|
Постоянная времени
|
Коэффициент передачи привода
|
Постоянная времени привода
|
Момент инерции снаряда
|
По углу крена
|
По угловой скорости
|
По углу отклонения элеронов
| ||
|
1 |
1.0 |
2.0 |
1.3 |
- |
10.0 |
0.8 |
0.03 |
0.07 |
2.0 |
5.5 |
- |
6.4 |
2.5 |
|
2 |
1.2 |
3.5 |
- |
0.75 |
11.2 |
0.7 |
0.05 |
0.05 |
1.58 |
8.2 |
2.3 |
- |
3.0 |
|
3 |
1.4 |
2.5 |
1.35 |
- |
14.0 |
1.2 |
0.04 |
0.16 |
1.81 |
7.5 |
5.8 |
- |
2.1 |
|
4 |
0.5 |
3.0 |
- |
0.82 |
8.0 |
1.0 |
0.07 |
0.09 |
2.81 |
6.3 |
- |
7.3 |
4.5 |
|
5 |
0.8 |
4.0 |
1.22 |
- |
9.0 |
1.2 |
0.02 |
0.125 |
2.5 |
9.5 |
2.5 |
- |
2.0 |
|
6 |
0.9 |
3.0 |
- |
0.85 |
12.0 |
1.0 |
0.08 |
0.09 |
1.8 |
8.4 |
- |
5.4 |
1.8 |
|
7 |
0.8 |
2.0 |
1.18 |
- |
13.0 |
0.8 |
0.02 |
0.1 |
2.8 |
7.5 |
6.3 |
- |
2.8 |
|
8 |
1.1 |
8.5 |
- |
0.78 |
8.2 |
0.9 |
0.1 |
0.11 |
2.5 |
5.8 |
2.8 |
- |
3.0 |
|
9 |
1.2 |
2.0 |
1.37 |
- |
7.5 |
0.35 |
0.02 |
0.09 |
1.33 |
6.2 |
3.9 |
- |
4.8 |
|
10 |
1.4 |
3.0 |
- |
0.73 |
6.3 |
0.59 |
0.04 |
0.06 |
1.29 |
5.3 |
- |
6.7 |
3.1 |
|
11 |
1.6 |
3.5 |
1.4 |
- |
5.2 |
0.71 |
0.02 |
0.07 |
1.11 |
4.8 |
- |
5.0 |
2.8 |
|
12 |
1.7 |
2.0 |
- |
0.76 |
8.4 |
0.82 |
0.03 |
0.08 |
1.11 |
5.6 |
4.3 |
- |
2.3 |
|
13 |
1.5 |
2.5 |
1.45 |
- |
9.3 |
0.95 |
0.07 |
0.09 |
1.75 |
8.3 |
- |
7.1 |
2.8 |
|
14 |
1.4 |
3.0 |
- |
0.8 |
7.6 |
1.2 |
0.08 |
0.1 |
2.38 |
8.7 |
- |
4.0 |
3.1 |
|
15 |
1.3 |
2.5 |
1.38 |
- |
5.8 |
1.1 |
0.09 |
0.12 |
2.0 |
7.8 |
2.0 |
- |
2.4 |
Примечания:
1.
В качестве объекта управления в этой
системе принять управляемый снаряд и
привод для элеронов, который представляется
апериодическим звеном с постоянной
времени
![]() и коэффициентом передачи
и коэффициентом передачи![]() .
.
2.
При анализе системы считать, что внешний
возмущающий момент
![]() носит ступенчатый характер.
носит ступенчатый характер.