курсовая работа / Курсач тау / Раздел 11
.doc1. Введение. Анализ исходной структуры и выбор метода синтеза
В настоящее время почти во всех областях техники значительную роль в повышении производительности играет автоматизация различного рода процессов. Развитие теории автоматического управления как одной из базовых наук и реализация научных результатов, обуславливающих рациональные технико-экономические решения, являются главными условиями совершенствования автоматических систем.
Рассмотрим некоторые понятия курса теории управления.
Совокупность объекта управления и регулятора представляет Систему Автоматического Управления (САУ).
Регулятор – устройство (или комплекс устройств) в САУ, которое вырабатывает управляющие воздействия в соответствии с требуемым законом регулирования. Автоматический регулятор включает в себя измерительное устройство, т.е. чувствительный элемент, реагирующий на отклонение регулируемой величины, далее ставится усилительно – преобразовательное устройство, затем идет исполнительное устройство, служащее для оказания соответствующего воздействия на объект управления.
Объект управления – это такой агрегат, в котором происходит процесс, подлежащий регулированию.
САУ – такая автоматически действующая система, которая в течение достаточно длительного времени поддерживает требуемое неизменное значение некоторой физической величины в каком-либо процессе или же изменяет это значение по заранее заданной программе.
Основные виды САУ: системы стабилизации; программного управления; следящие системы; адаптивные; системы оптимального управления; системы с поиском экстремума показателя качества.
Следящей системой называется такая система, которая на выходе (на объекте управления) воспроизводит задаваемую ей на входе величину, произвольно меняющуюся во времени.
Следящие системы характеризуются тем, что задаваемый закон изменения выходной координаты является случайной функцией времени. Так, антенна радиолокатора поворачивается, следуя за движением самолета, маневр которого носит случайный характер и заранее не определен.
Можно сказать, что следящие системы широко применяются в различных областях техники, где требуется воспроизведение одним устройством перемещения другого устройства без механической связи между ними.
Такая необходимость возникает при дистанционном управлении механизмами (вентилями, клапанами, задвижками и т.д.) и измерении различных технологических величин с передачей показаний приборов на расстояние.
Задача синтеза АСУ состоит в выборе её структуры, параметров и способов их реализации которые при заданных ограничениях наилучшим образом удовлетворяют требованиям, предъявляемым к системе.
Анализ исходной системы и выбор методов синтеза КУ:
Система имеет следующую структуру:
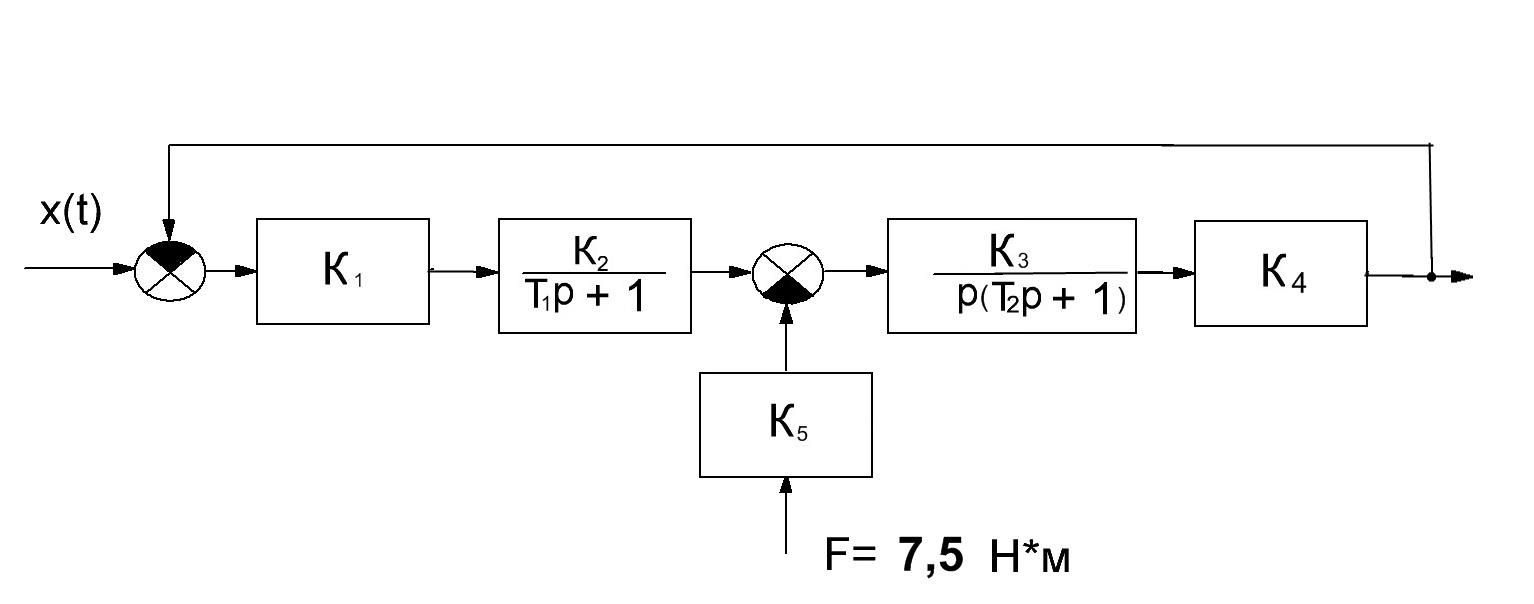 Где
Где![]()
![]()
![]()
![]()
![]()
![]()
![]()
Задача сводится к выбору структуры и параметров КУ обратной связи.
При расчете системы путем синтеза определить передаточную функцию замкнутой системы непосредственно по заданным показателям качества, т. е. определить передаточную функцию системы в разомкнутом состоянии и передаточную функцию корректирующего устройства, его структуру и точки подключения.
Методы решения поставленной задачи:
-
Синтез корректирующих устройств с помощью логарифмических частотных характеристик.
-
Синтез корректирующих устройств с помощью амплитудно-фазовых характеристик
-
Синтез САУ, основанный на оптимизации контуров управления.
Одним из самых удобных и наглядных методов синтеза систем с заданными качественными показателями является частотный и в частности метод логарифмических амплитудных характеристик. Позволяет легко определить структуру и параметры корректирующих устройств, если будет сформирована ЛАЧХ системы, отвечающей заданным качественным показателям. Задача сводится к построению ЛАЧХ желаемой системы, которая обеспечивает заданную точность и динамику переходного процесса.