

3 Техническая структура следящей системы
3.1 Разработка схемы управляющего устройства на операционных усилителях
Для
реализации устройства управления
следящей системы перейдем от уравнений
(6.26) к соответствующим уравнениям в
переменных состояния.
При этом необходимо пользоваться
соотношениями переxoда
для
канонической наблюдаемой формы [3. С.
127-128]. При r=3 и
![]() 1
эти уравнения имеют вид
1
эти уравнения имеют вид

(3.1)
Подставляя коэффициенты полиномов R(p), L(p) и Q(p) получим
 (3.2)
(3.2)
По уравнениям (3.2) составим функциональную схему ДУУ, приведенную на рисунке 3.1

Рисунок 3.1 – Функциональная схема ДУУ.
По функциональной схеме построим схему ДУУ на операционных усилителях. Принципиальная схема ДДУ показана на рисунке 3.2

![]()
Рисунок 3.2 – Принципиальная схема ДУУ
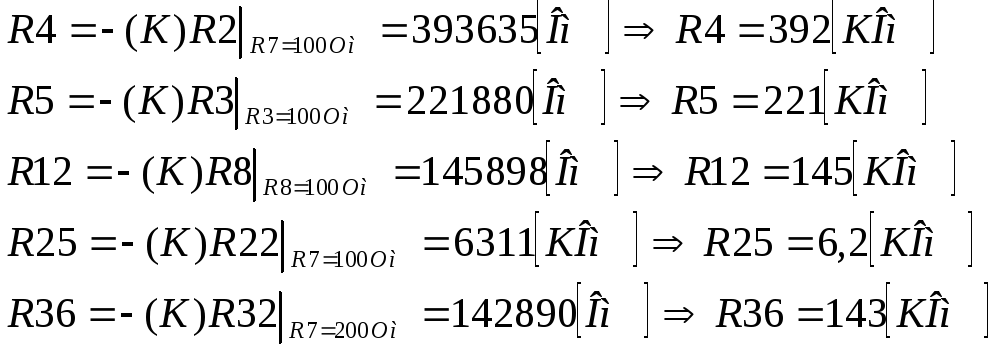
На операционных усилителях DA1, DA3, DA4, DA11, DA14 собраны инвертирующие усилители с коэффициентами усиления соответственно
![]() =-3936,35
=-3936,35![]() =-2218,8
=-2218,8
![]() =-1458,98
=-1458,98
![]() -63,11
-63,11
![]() =-714,45
=-714,45
Схема инвертирующего усилителя показана на рисунке 3.3.

Рисунок 3.3 – Схема инвертирующего усилителя
Передаточная функция инвертирующего усилителя имеет вид
![]() ,
,
Выбрав сопротивление R1, сопротивление R2 вычисляется по формуле:
![]()
Выбрав сопротивление
резисторов
![]() ,
,![]() ,
,![]()
![]()
![]() ,
рассчитаем сопротивления резисторов
,
рассчитаем сопротивления резисторов
![]() и выберем их номиналы из стандартного
ряда сопротивлений Е192:
и выберем их номиналы из стандартного
ряда сопротивлений Е192:
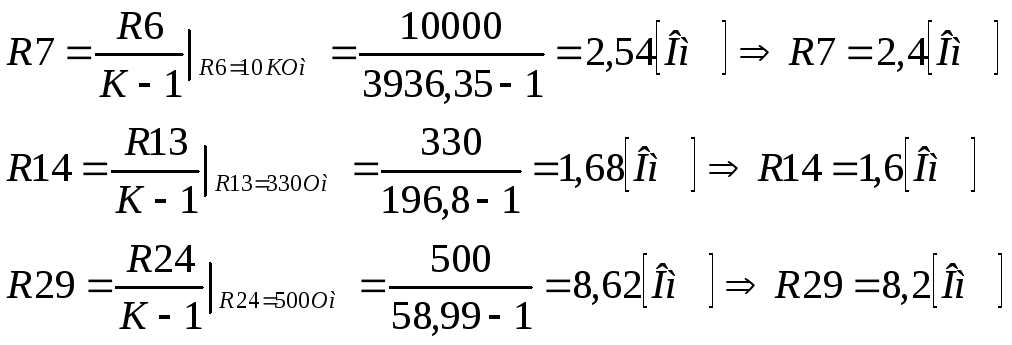
На операционных усилителях DA2, DA5, DA10 собраны неинвертирующие усилители с коэффициентами усиления соответственно
![]() =3936,35
=3936,35![]() =196,8
=196,8
![]() =58,99
=58,99
Схема неинвертирующего усилителя показана на рисунке 3.4.

Рисунок 3.4 – Схема неинвертирующего усилителя
Передаточная функция инвертирующего усилителя имеет вид
![]() ,
,
Выбрав сопротивление R1, сопротивление R2 вычисляется по формуле:
![]()
Выбрав сопротивление
резисторов
![]() ,
,![]() ,
,![]() рассчитаем
сопротивления резисторов
рассчитаем
сопротивления резисторов
![]() и выберем их номиналы из стандартного
ряда сопротивлений Е192:
и выберем их номиналы из стандартного
ряда сопротивлений Е192:
3.2 Принципиальная схема разработанной следящей системы
Принципиальная схема разработанной следящей системы приведена в приложении 1.
Работает указанная
СС следующим образом. В установившемся
режиме и при отсутствии нагрузки величина
угла рассогласования близка к нулю. При
повороте ротора сельсина-датчика на
некоторый угол происходит отклонение
![]() задающим устройством на некоторую
постоянную величину, на обмотке
возбуждения этого сельсина появляется
напряжение. Сигнал подаётся на
фазочувствительный усилитель-выпрямитель
с активно-ёмкостной нагрузкой. С выхода
фазочувствительного усилителя-выпрямителя
выпрямленное напряжение, а также
преобразованный ИП2 в напряжение угол
поворота выходного вала
задающим устройством на некоторую
постоянную величину, на обмотке
возбуждения этого сельсина появляется
напряжение. Сигнал подаётся на
фазочувствительный усилитель-выпрямитель
с активно-ёмкостной нагрузкой. С выхода
фазочувствительного усилителя-выпрямителя
выпрямленное напряжение, а также
преобразованный ИП2 в напряжение угол
поворота выходного вала ![]() поступают на вход устройства управления,
построенного на операционных усилителях
с применением схем сумматоров и
инвертирующих интеграторов. Далее
управляющий сигнал подаётся на усилитель
напряжения и мощности, затем – на якорную
обмотку двигателя постоянного тока.
Угол поворота ротора двигателя,
преобразованный редуктором, поступает
на сельсин-приемник. Если
поступают на вход устройства управления,
построенного на операционных усилителях
с применением схем сумматоров и
инвертирующих интеграторов. Далее
управляющий сигнал подаётся на усилитель
напряжения и мощности, затем – на якорную
обмотку двигателя постоянного тока.
Угол поворота ротора двигателя,
преобразованный редуктором, поступает
на сельсин-приемник. Если ![]() ,
в обмотке синхронизации сельсинов
возникнут токи, которые и приводят к
появлению напряжения на обмотке
возбуждения сельсина-приемника. Этот
процесс продолжается до тех пор, пока
роторы обоих сельсинов не окажутся в
согласованном положении.
,
в обмотке синхронизации сельсинов
возникнут токи, которые и приводят к
появлению напряжения на обмотке
возбуждения сельсина-приемника. Этот
процесс продолжается до тех пор, пока
роторы обоих сельсинов не окажутся в
согласованном положении.
Заключение
В данной курсовой работе была синтезирована и исследована следящая система и с использованием методики синтеза двумерного устройства управления по заданным показателями качества.
Данная курсовая работа выполнена с помощью программного пакета SIMULINK for Windows в системе MATLAB (для проведения численного моделирования) и программы Mathcad (для выполнения расчётов).
В данной курсовой работе было синтезировано двумерное устройство управления. Для этого выведены дифференциальные уравнения в переменных состояния всех элементов, а также заданной части системы; проверены наблюдаемость, управляемость и устойчивость заданной части; построена структурная расчётная схема, выведены уравнения вход-выход; выполнено моделирование с помощью SIMULINK в системе MATLAB, а также построена схема управляющего устройства на операционных усилителях.
Нескорректированная система оказалась неустойчивой. Возникла необходимость разработки устройства управления. Скорректированная система отвечает заданным критериям качества.
Библиографический список
-
Гайдук А. Р., Пьявченко Т. А. Учебно-методическое пособие по выполнению курсовой работы «Динамический расчет следящих систем» по дисциплине «Теория управления». Таганрог: Изд-во ТРТУ, 2001. 19с.
-
Теория автоматического управления. Под ред. А. В. Нетушила. Учебник для вузов. Изд. 2-е. М., "Высшая школа",1976.
-
А. Р. Гайдук. Теория автоматического управления. Таганрог: Изд-во ТРТУ, 2004. 208с.