

-
Вывод уравнений исполнительного устройства (иу) системы в переменных состояния и «вход-выход»
-
Уравнения в переменных состояния
-
Используя полученные в предыдущем разделе уравнения в переменных состояния для исполнительной части следящей системы
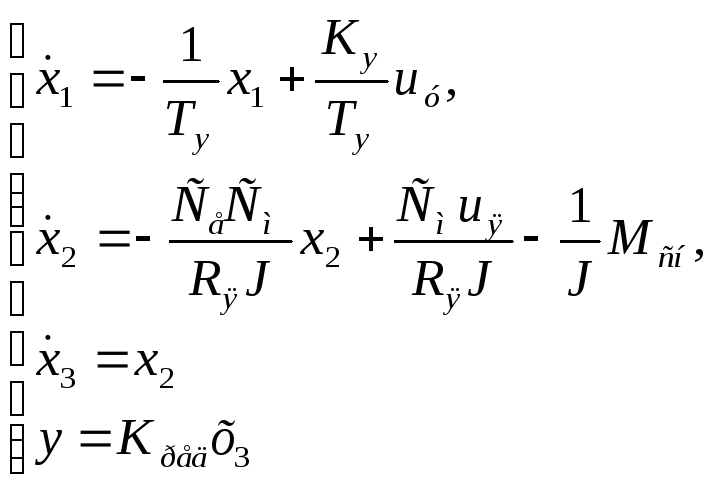 (1.27)
(1.27)
![]() Представим
эти уравнения в
матричном
виде
Представим
эти уравнения в
матричном
виде
 (1.28)
(1.28)
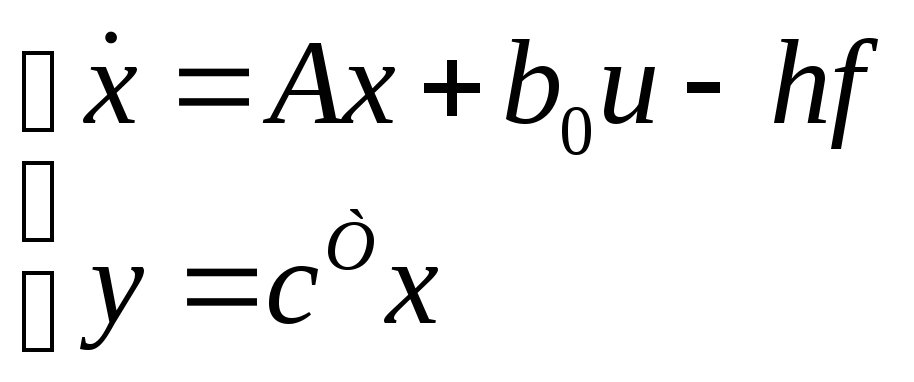
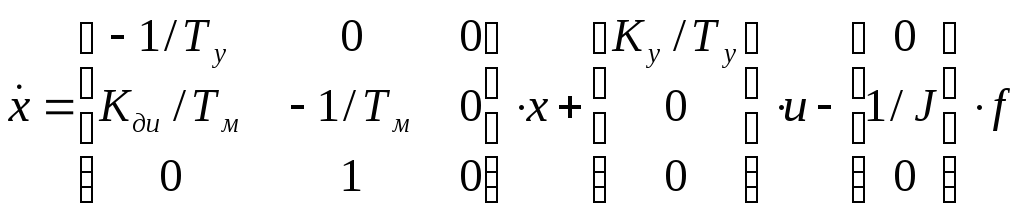
Получим уравнения в переменных состояния для исполнительной части следящей системы :
![]()
![]()
где
![]()
Подставив численные значения коэффициентов, поучим
![]()
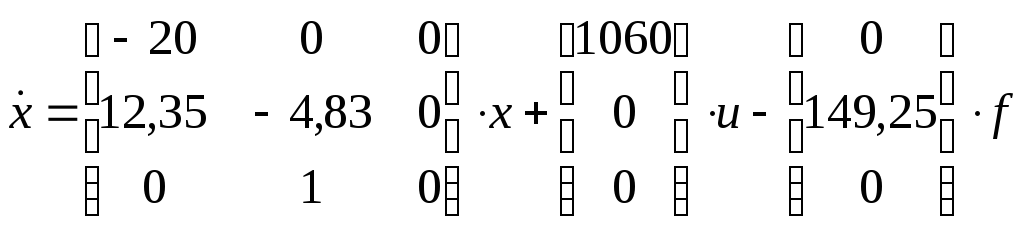
![]()
-
Уравнения вход – выход исполнительной части системы
Для вывода этого уравнения целесообразно построить структурную схему, показанную на рисунке 1.3:
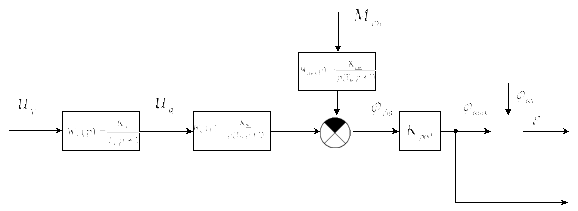
Рисунок 1.3 - Структурная схема заданной части.
Составим уравнение “вход-выход” исполнительной части системы. Они выводятся путем исключения промежуточных переменных из полученных уравнений “вход-выход” элементов системы. Так же объединение уравнений элементов можно провести и с помощью передаточных функций элементов.
 (1.29)
(1.29)
Введем обозначение![]() и
и
![]() ,
,
![]() ,
,
![]() .
Из уравнения (1.29) получим следующее
выражение:
.
Из уравнения (1.29) получим следующее
выражение:
![]() (1.30)
(1.30)
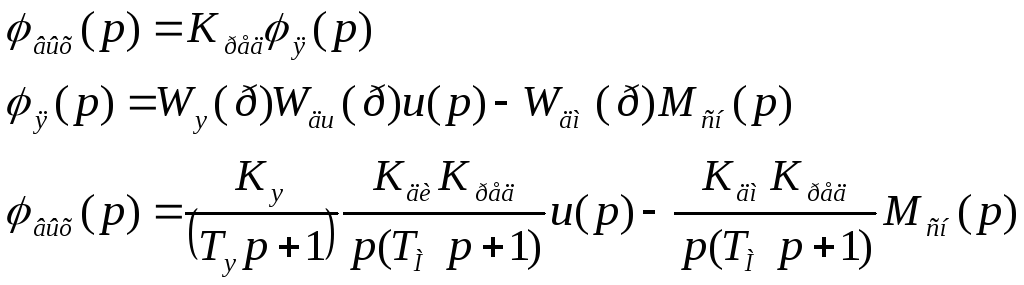
Умножив обе части
уравнения (1.29) на
![]() ,
получим уравнение “вход-выход”
исполнительной части следящей системы:
,
получим уравнение “вход-выход”
исполнительной части следящей системы:
![]() (4.5)
(4.5)
Уравнения “вход-выход” (1.2) и (1.4) для измерительной части системы, состоящей из СЭ, ИП-1, ИП-2, не меняются.
-
Исследование управляемости наблюдаемости и минимально-фазовости иу системы
1.5.1 Проверка управляемости и наблюдаемости заданной части системы
Обычно предполагают, что объект управления (система) обеспечивает возможность изменения его переменных состояния и регулируемых величин в соответствии с целью управления с помощью управлений, приложенных к нему. Однако ясно, что в общем случае не всякий объект управления допускает такую возможность, т. е не каждый объект является управляемым. Следует отметить, что свойство управляемости зависит исключительно от внутренних свойств объекта (системы).
Для оценки управляемости систем используется критерий Калмана, в основе которого лежит матрица управляемости U
![]()
где
![]() -
размерность вектора переменных состояния
-
размерность вектора переменных состояния
![]() .
.
Для заданной системы матрица U принимает вид:
![]()
Для определения наблюдаемости системы используется критерий наблюдаемости, предложенный Калманом. Этот критерий использует матрицу наблюдаемости, которая для систем имеет вид
![]()
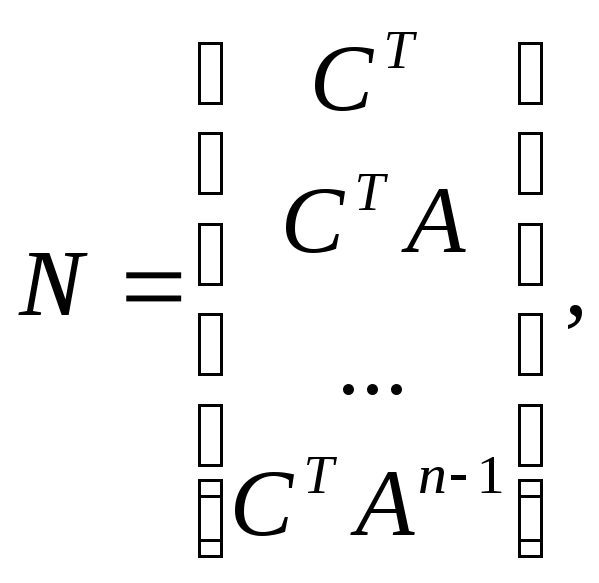
где ![]() -
размерность вектора переменных состояния
-
размерность вектора переменных состояния
![]() .
.
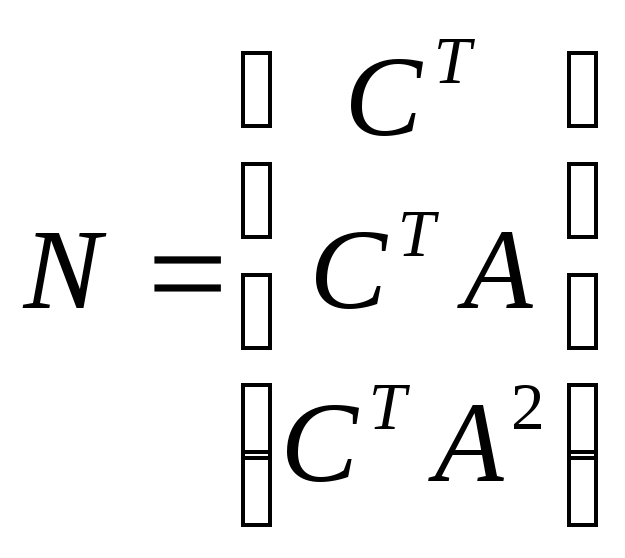
В нашем случае матрица наблюдаемости есть
Проверим управляемость и наблюдаемость с помощью программы, написанной в MatLab:
A=[-20 0 0;12.35 -4.83 0;0 1 0];
B=[1060;0;0];
C=[0 0 0.0095];
disp(['порядок системы равен', num2str(size(A))]);
U=ctrb(A,B);
disp(['ранг U равен', num2str(rank(U))]);
N=obsv(A,C);
disp(['ранг N равен',num2str(rank(N))]);
Результат работы программы:
порядок системы равен 3
ранг U равен3
ранг N равен3
Анализируя результат выполнения программы можно сделать вывод о том, что критерий Калмана для управляемости и наблюдаемости выполняются в обоих случаях, следовательно, заданная часть следящей системы является полностью управляемой и полностью наблюдаемой соответственно.