

2 Разработка устройства управления
-
Синтез управления
Устройство
управления (УУ) ищется таким,
чтобы замкнутая система обладала
астатизмом порядка
![]() =1
к
задающему воздействию g.
При
этом время регулирования
по задающему воздействию должно быть
не более
=1
к
задающему воздействию g.
При
этом время регулирования
по задающему воздействию должно быть
не более
![]() ,
а
перерегулирование не более
,
а
перерегулирование не более
![]() .
Предполагается,
что
на
вход УУ
поступают
два сигнала: задающее воздействие
g
и
управляемая переменная у.
Относительная
степень УУ
равна
.
Предполагается,
что
на
вход УУ
поступают
два сигнала: задающее воздействие
g
и
управляемая переменная у.
Относительная
степень УУ
равна
![]() .
.
Рассмотрим
методику синтеза УУ
по
заданным показаниям
качества, при![]() =1, а заданная часть описывается
уравнением [3]
=1, а заданная часть описывается
уравнением [3]
![]() (2.1)
(2.1)
где у - управляемая переменная системы;
![]() -
возмущение (для
рассматриваемой следящей системы
-
возмущение (для
рассматриваемой следящей системы
![]() ,а
,а
![]() ),
),
причем
![]()
![]() ,
,
![]()
Будем
предполагать также, что полином В(р)
в
(9) является
числом или полиномом, удовлетворяющим
условиям Гурвица,
т.е.
В(р) =
![]()
Так как заданный объест управления является минимально-фазовым, поэтому можно синтезировать систему, полагая характеристический полином замкнутой системы равным
![]() (2.2)
(2.2)
![]()
где
![]() ,
,
![]() -
коэффициент
полинома В(р)
при
p
в старшей степени т;
-
коэффициент
полинома В(р)
при
p
в старшей степени т;
![]() -
гурвицевый
полином, выбираемый по условиям качества
синтезируемой
системы.
-
гурвицевый
полином, выбираемый по условиям качества
синтезируемой
системы.
![]() -
полином,
имеющий нули, равные тем нулям полинома
А(р),
модуль
реальной части которых является
достаточно большим,
т.е. эти нули располагаются в области
-
полином,
имеющий нули, равные тем нулям полинома
А(р),
модуль
реальной части которых является
достаточно большим,
т.е. эти нули располагаются в области
![]() ,
комплексной
плоскости,
допустимой для дайной системы. Выражения
для высокочастотной и низкочастотной
составляющей запишутся в виде
[1]
,
комплексной
плоскости,
допустимой для дайной системы. Выражения
для высокочастотной и низкочастотной
составляющей запишутся в виде
[1]
![]() (2.3)
(2.3)
![]() (2.4)
(2.4)
В соответствии с рассматриваемым методом синтеза сначала ищется уравнение «вход-выход» искомого УУ в виде [1]
R(p)u = Q(p)g-L(p)y, (2.5)
где R(p), Q(p), L(p) -полиномы, подлежащие определению в процессе синтеза. При этом по условиям физической реализуемости должны выполняться неравенства
![]()
![]() (2.6)
(2.6)
или
![]()
![]()
где
![]()
![]()
![]()
![]() - заданная относительная степень УУ.
Относительная
степень УУ
зависит от свойств элементов, из которых
строится синтезируемое УУ.
- заданная относительная степень УУ.
Относительная
степень УУ
зависит от свойств элементов, из которых
строится синтезируемое УУ.
Как видно, УУ (2.1) имеет, в общем случае, не менее двух входов по задающему воздействию g и по управляемой переменной - у (выходу системы), поэтому оно и называется двумерным устройством управления (ДУУ).
Относительной
степенью
![]() управляемой динамической
системы называется минимальный порядок
производной
по времени от выхода системы, которая
явно зависит от управления.
В случае линейного ДУУ его относительная
степень
управляемой динамической
системы называется минимальный порядок
производной
по времени от выхода системы, которая
явно зависит от управления.
В случае линейного ДУУ его относительная
степень
![]()
(2.7)
Для обеспечения астатизма порядка vg по задающему воздействию необходимо, чтобы в разомкнутой цепи системы управления было vg интеграторов. Если
![]() (2.8)
(2.8)
причем v0 < vg , то в ДУУ необходимо ввести
![]() (2.9)
(2.9)
интеграторов.
Подставляя заданные значения
![]() в (2.9) получим
в (2.9) получим
![]()
Таким образом очевидно что вводить в ДУУ дополнительные интеграторы не нужно.
Для определения уравнения «вход-выход» искомого УУ (2.5) применяют следующие формулы
![]() (2.10)
(2.10)
![]() (2.11)
(2.11)
где
![]() ,
,![]() - неизвестные
пока полиномы.
При этом характеристический полином
D(p)
замкнутой
системы имеет вид
- неизвестные
пока полиномы.
При этом характеристический полином
D(p)
замкнутой
системы имеет вид
![]() (2.12)
(2.12)
Так как в этом равенстве
![]() ,
(2.
13)
,
(2.
13)
то
сокращая общие множители
![]() и
и
![]() ,подставляя
,подставляя
![]() получим
получим
![]() (2.
14)
(2.
14)
или
подставляя
![]() ,
,
![]() =1,95 и
выражение
(2.4), получим
=1,95 и
выражение
(2.4), получим
![]() .
(2.
15)
.
(2.
15)
Степень
![]() полинома
полинома
![]() в
(2.15), равна степени
произведения
в
(2.15), равна степени
произведения
![]() .
Следовательно,
в системе уравнений, которой
эквивалентно полиномиальное уравнение
(6.15), содержится
.
Следовательно,
в системе уравнений, которой
эквивалентно полиномиальное уравнение
(6.15), содержится
Ny
=![]() +
1
+
1
уравнений и
Nk=![]() +
1 +
+
1 +
![]() +1=
+1=![]() +
+
![]() +2
+2
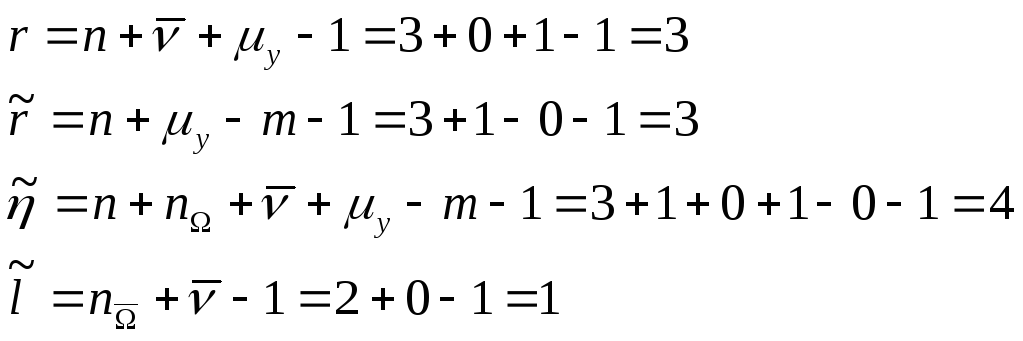
неизвестных коэффициентов, т.е.
Ny
Ny
=![]() +
1=
+
1=![]() +
+
![]() ,
,
Nk=
![]()
Д![]() ля
разрешимости указанной системы
необходимо, чтобы выполнялось следующее
условие
ля
разрешимости указанной системы
необходимо, чтобы выполнялось следующее
условие
Nk =Nу.
Отсюда,
используя приведённые выражения, найдём
неизвестные величины( при
![]()
![]() )
)
Для
выбора коэффициентов полинома
![]() степени
степени
![]() пользуются
стандартные передаточные функции [1].
По заданному порядку астатизма
пользуются
стандартные передаточные функции [1].
По заданному порядку астатизма
![]() =1
,
степени
=1
,
степени
![]() =5
и перерегулированию
=5
и перерегулированию
![]() выбираются коэффициенты
выбираются коэффициенты
![]() и величина
и величина
![]() .
.
Таблица 6.1
|
Порядок
астатизма
|
Степень
знаменателя
|
Коэффициенты |
Перерегулирование |
Время
регулирования
|
Примечание |
|||||
|
|
|
|
|
|
|
|||||
|
1 |
5 |
1 |
3,64 |
5,46 |
5,3 |
2,6 |
1 |
нет |
5,7 |
Минимальное время регулирования |
Далее вычисляются временной масштабный коэффициент
![]()
а
затем желаемые коэффициенты полинома
![]() по
формуле
по
формуле
![]() (2.
16)
(2.
16)
Подставляя выбранные коэффициенты, получим
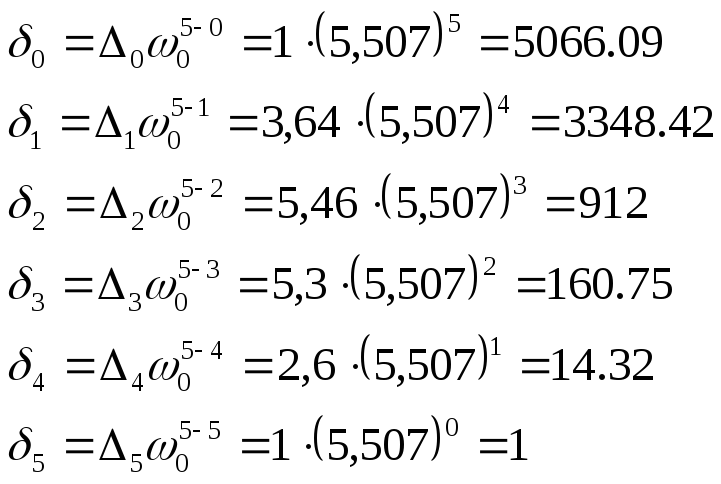
![]()
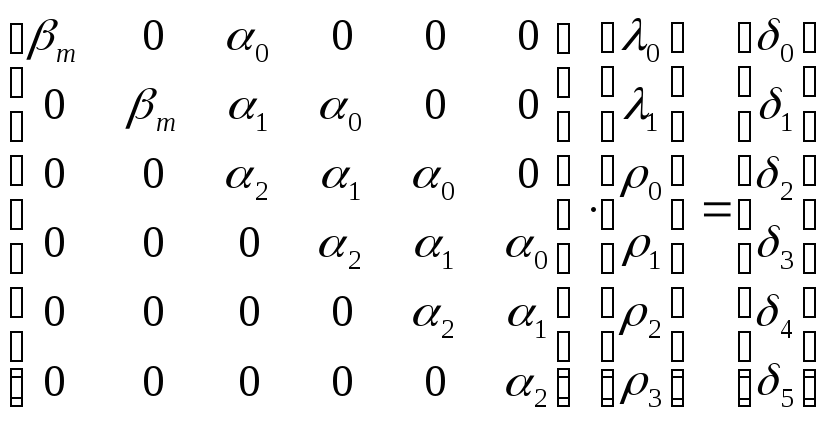
После этого записывается соответствующая система уравнению (2.15) система следующего вида:

(2.17)
Матрица
этой системы имеет
![]() +1=2
столбцов, составленных из коэффициента
+1=2
столбцов, составленных из коэффициента
![]() ,
и
,
и
![]() +1
=4 столбцов,
составленных из коэффициентов
полинома
+1
=4 столбцов,
составленных из коэффициентов
полинома
![]()
Получим систему
Подставив численные значения, получим
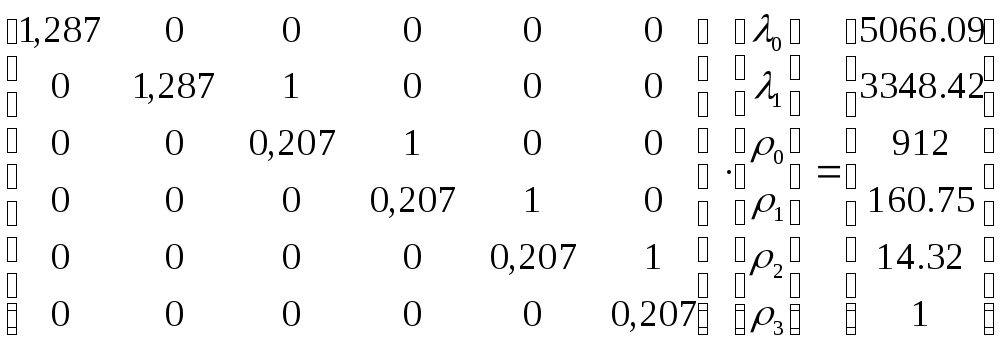
Перемножив матрицу на столбец получим систему уравнений
 (2.18)
(2.18)
Решая систему
уравнений (2.18) относительно
![]() и
и
![]() ,
получим численные значения
коэффициентов полиномов
,
получим численные значения
коэффициентов полиномов
![]() и
и
![]()
![]()
Решение системы (2.18) позволяет записать полиномы:
![]() (2.19)
(2.19)
![]() (2.20)
(2.20)
а затем полиномы R(p), L(p) по приведённым выше выражениям (2.10),(2.11).
![]()
![]()
![]()
![]()
Полином Q(p) определяется по формуле
![]() (2.21)
(2.21)
Подставив известные значения и выражение (2.4) получим
![]()
Проверим условие физической реализуемости по (2.6)
![]()
![]()
Условие выполняется.
Таким образом, найдены все полиномы ДУУ, и можно записать его уравнение по формуле (2.5). В синтезируемой следящей системе измеряемыми являются отклонение
![]() (2.22)
(2.22)
и
управляемая переменная
![]() ,
а управлением – напряжение на входе
усилителя мощности
,
а управлением – напряжение на входе
усилителя мощности
![]() Поэтому
заменяя в формуле (2.5) g
по формуле (2.22) и приводя подобные,
получим следующее уравнение
Поэтому
заменяя в формуле (2.5) g
по формуле (2.22) и приводя подобные,
получим следующее уравнение
R(p)Uy
= Q(p)![]() –
(L(p)
- Q(p) )
–
(L(p)
- Q(p) )![]() , (2.23)
, (2.23)
Подставим раннее найденные полиномы R(p), Q(p) и L(p) в (2.23)
(![]() )Uy
=
(
)Uy
=
(![]() )
)![]() –
–
-((![]() 5)-(
5)-(![]() ))
))![]() ,
,
Приведем подобные и в результате получим уравнение
(![]() )Uy
=
(
)Uy
=
(![]() )
)![]() -
-
-(![]() ))
))![]() (2.24)
(2.24)
Наконец,
заменяя в уравнении (2.23)
![]() и
и
![]() из выражений (1.2), (1.4), получим уравнение
физически реализуемого ДУУ
из выражений (1.2), (1.4), получим уравнение
физически реализуемого ДУУ
![]() (2.25)
(2.25)
Подставив найденные полиномы, получим
![]()
Упростив выражение, получим:
![]() (2.26)
(2.26)
Уравнение (2.26) позволяет представить схему синтезированной следящей системы в виде, показанном на рисунке 2.1

Рисунок 2.1 – Структурная схема следящей системы
На рисунке 2.1 символом ИУ обозначены исполнительные элементы следящей системы: усилитель, двигатель и редуктор, а символом РДДУ – реализуемое двумерное устройство управления.
-
Описание схемы модели и результатов моделирования разработанной следящей системы.
Структурная схема следящей системы, выполненная с учетом выражения (6.26) и схемы 2.1 выполненная в MatLab показана на рисунке 2.2.

Рисунок 2.2 – Структурная схема следящей системы, выполненная в MatLab
Произведем моделирование переходных процессов в системе, подавая на ее вход сначала единичную ступенчатую функцию, затем линейно – нарастающее воздействие, при отсутствии и наличии момента сопротивления нагрузки
![]() .
.
В результате моделирования получим следующие графики, показанные на рисунках 2.3 – 2.6.

Рисунок 2.3 – Переходная функция системы без момента сопротивления нагрузки
Время регулирования на основе переходной характеристики 1,4 с.

Рисунок 2.5 – Реакция системы на линейно – нарастающую функцию без момента сопротивления нагрузки
Скоростная онибка равна 0,7 радиан. На основе анализа графиков можно заключить, что система обладает астатизмом первого порядка.
Рисунок 2.4 – Переходная функция системы с моментом сопротивления нагрузки
Время регулирования 1.45с.
Рисунок 2.5 – Реакция системы на линейно – нарастающую функцию с моментом сопротивления нагрузки