

3.5 Построение переходного процесса импульсной системы
Для построения переходного процесса воспользуемся программой Simulink, для этого смоделируем систему для получения переходного процесса (рисунок 17). При этом был получен переходный процесс, представленный на рисунке 18.
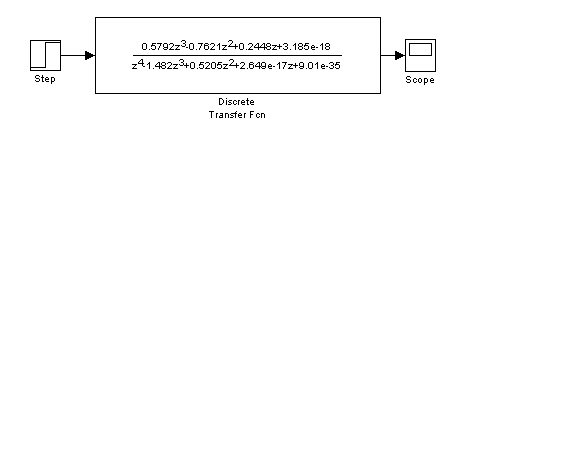
Рисунок 21 – Модель переходного процесса для импульсной системы
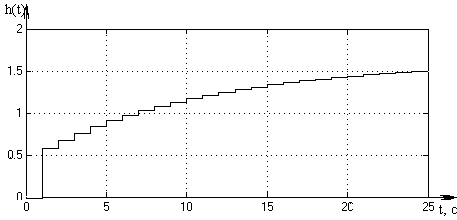
Рисунок 22 – Переходный процесс импульсной системы
Из переходного процесса видно, что система является устойчивой.
Вывод.
Судя по критерию устойчивости Шур-Кона и по переходному процессу, можно судить, что система является устойчивой.
Заключение
В ходе данной курсовой работы, была рассмотрена система автоматического управления процессом получения известкового молока. Были получены функциональная и структурная схемы системы. Исследована линейная, нелинейная и импульсная части системы.
В ходе исследования линейной системы, была получена передаточная функция, по которой был построен переходный процесс, который свидетельствовал об устойчивости линейной системы. Также система оказалась устойчивой по критериям Гурвица и Найквиста. Определены прямые и косвенные оценки качества системы
Нелинейная система была получена путем введения нелинейного элемента с заданной статической характеристикой. В ходе исследования полученной системы был построен фазовый портрет – сходящаяся в точке кривая. Следовательно, при введении нелинейного элемента типа реле, система останется устойчивой.
Импульсная система, полученная введением цифрового элемента, также осталась устойчивой, о чем свидетельствует критерий Шур-Кона и полученный переходный процесс.
По сохранению устойчивости можно сделать вывод, что в систему можно ввести как нелинейный элемент типа реле, так и цифровой регулятор, это не скажется отрицательно на устойчивой работе системы.
Список использованной литературы
-
Автоматизация и современные технологии / Под ред. Анисимова. М: 2005 №12.
-
Айзерман М.А. Теория автоматического регулирования. 2- е издание. – М.: Наука,1966. – 452 с.
-
Бесекерский В.А. Теория систем автоматического регулирования/ В.А. Бесекерский, Е.П. Попов. – М.: Профессия, 2003. – 380 с.
-
Климовицкий М.Д. Автоматический контроль и регулирование: Справочник. – Л.: Металлургия, 1987. – 345 с.
-
Кошарский Б.Д., Бек В.А. Автоматические приборы и регуляторы. – Ь.: Машиностроение, 1964. – 704 с.
-
Лапшинков Г.И., Полоцкий Л.М. Автоматизация производственных процессов в химической промышленности. Технический средства и лабораторные работы. – М.: Химия, 1988. – 288 с.
-
Летов А.М. Устойчивость нелинейных регулируемых систем. – М.: Физматгиз, 1962. – 315 с.
-
Обновленский П.Л., Гуревич А.Л. Основы автоматизации химических производств. – М.: Химия, 1975. – 328 с.
-
Поспелов Г.С. Импульсные системы автоматического регулирования. – М.: Машгиз, 1950. – 256 с.
-
Промышленные приборы и средства автоматизации: Справочник/ В.Я. Баранов. Л.: Машиностроение, 1987. – 847 с.
-
Пугачев В.С.Основы автоматического регулирования. – М.: Наука, 1974. –720 с.
-
Топчеев Ю.И. Атлас для проектирования систем автоматического управления. – М.: Машиностроение, 1982. – 312 с.
|
|
|
|
|
|
УИТС.421413.208 ПЗ |
Лист |
|
|
|
|
|
|
|
|
|
Изм |
Лист |
№ докум |
Подп. |
Дата. |