

Математическое моделирование движения иглы в замке вязального механизма на эвм
Математическая модель (5) движения иглы в замке вязального механизма представляет собой нелинейное дифференциальное уравнение второго порядка. Для решения математической модели (5), с учетом (1), (6), (7) и (8) воспользуемся численным методом Рунге-Кутта ΙV, предварительно воспользовавшись заменой
 ,
,
 ,
,
приведем (5) к каноническому виду
 ,
(16)
,
(16)
при
t=0
 .
.
Для решения математической модели на ЭВМ воспользуемся системой инженерных и научных расчетов MATLAB [4] и входящей в нее функцией ode45( ), предназначенной для решения дифференциальных уравнений методом Рунге-Кутта четвертого и пятого порядка с автоматическим выбором шага интегрирования. Обращение к функции ode45( ) в программе на языке программирования системы MATLAB имеет вид
[t,Y]=ode45(@fundydt,[t0,tk],y0);
где выходные параметры:
@fundydt – имя функции, в которой вычисляются правые части системы дифференциальных уравнений, записанных в каноническом виде;
[t0,tk] – интервал времени, на котором производится инегрирование системы дифференциальных уравнений;
y0 – вектор начальных условий;
выходные параметры:
t – вектор-строка, содержащая моменты времени, соответствующие решению Y;
Y – выходной массив, каждая строка которого соответствует решению дифференциальных уравнений в моменты времени t.
Данная программа состоит из головного модуля и трех подпрограмм – функций ksi( ), sila( ), sysdif( ).
Блок-схема
работы данной программы представлена
на рисунке 7.
В головном модуле происходит ввод
исходных данных, решение дифференциального
уравнения математической модели, расчет
значений и построение графиков
зависимостей
 .
.
Подпрограмма
ksi(
) вычисляет
зависимости
 и
их
первой и второй передаточных функций
соответственно на участках Ι,
ΙΙ,
ΙΙΙ
по
зависимостям, определенным в результате
синтеза профиля клиньев замка. Длины
l1,
l2,
l3
соответствующих
участков вычисляются в головном модуле
после задания исходных данных.
и
их
первой и второй передаточных функций
соответственно на участках Ι,
ΙΙ,
ΙΙΙ
по
зависимостям, определенным в результате
синтеза профиля клиньев замка. Длины
l1,
l2,
l3
соответствующих
участков вычисляются в головном модуле
после задания исходных данных.
Подпрограмма
sila(
) вычисляет
значения сил F,
Fтр
и Р
в функции времени
t
и обобщенных координат
 .
.
Подпрограмма sysdif( ) вычисляет правые части системы дифференциальных уравнений (16).
Описание графиков
По результатам работы программы, представленной в «Приложении Д», были представлены графики положения, сил и деформаций иглы в замке вязального механизма.
На рисунке 1 представлены графики функции положения, первой и второй передаточной функций. Данные графики описывают зависимость перемещения, скорости и ускорения от длины участка.
Первый
график представляет собой функцию
положения
 .
Единицы измерения на данном графике
для длины L
и перемещения ξ – м. Движение начинается
из точки z=0
м и заканчивается в точке z=0,014.
На Ι
участке закон движения – парабола, на
ΙΙ
– прямая, на ΙΙΙ
– синусоида. Стыки между
Ι
и ΙΙ,
ΙΙ
и ΙΙΙ
участками плавные, скачков нет.
.
Единицы измерения на данном графике
для длины L
и перемещения ξ – м. Движение начинается
из точки z=0
м и заканчивается в точке z=0,014.
На Ι
участке закон движения – парабола, на
ΙΙ
– прямая, на ΙΙΙ
– синусоида. Стыки между
Ι
и ΙΙ,
ΙΙ
и ΙΙΙ
участками плавные, скачков нет.
Второй
график – это первая передаточная функция
 или скорость. На данном графике единицы
измерения скорости – м/с, длины – м.
Движение начинается из точки со значением
0. Ι
участок: прямая, скорость изменяется
по линейному закону от 0 до 0,8. Переход
на второй участок излом. На ΙΙ
участке
прямая, что означает что скорость
постоянная. Переход на третий участок
плавный. На ΙΙΙ
участке
– косинусоида. Скорсть меняется по
закону косинусоиды от 0,8 до 0.
или скорость. На данном графике единицы
измерения скорости – м/с, длины – м.
Движение начинается из точки со значением
0. Ι
участок: прямая, скорость изменяется
по линейному закону от 0 до 0,8. Переход
на второй участок излом. На ΙΙ
участке
прямая, что означает что скорость
постоянная. Переход на третий участок
плавный. На ΙΙΙ
участке
– косинусоида. Скорсть меняется по
закону косинусоиды от 0,8 до 0.
Третий
график – вторая передаточная функция или ускорение.
или ускорение.
На участке Ι прямая. Ускорение постоянное и равно 160 м/с2. Переход на второй участок – скачёк. ΙΙ участок прямая. Ускорение равно 0. Переход на третий участок – скачёк. На ΙΙΙ участке изображена синусоида. Максимальное ускорение на данном участке равно -160 м/с2.
Стык между Ι и ΙΙ, ΙΙ и ΙΙΙ участками в виде излома. Это свидетельствует о мягком ударе.
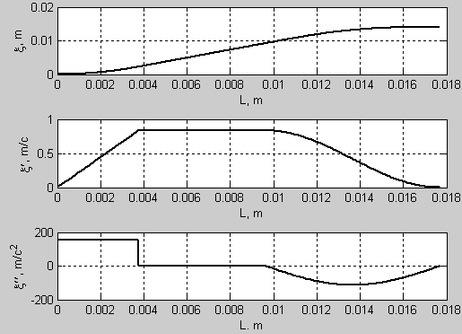
Рисунок 1 – графики функции положения, первой и второй передаточной функций
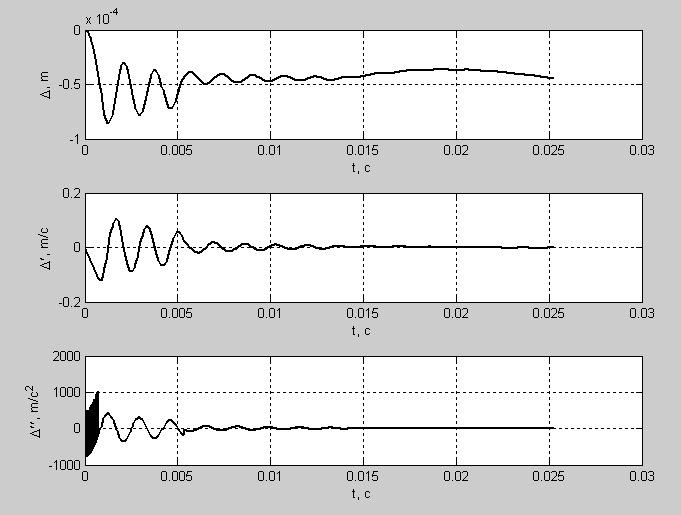
На рисунке 2 изображены графики затухающих гармонических колебаний, представляющих собой деформацию Δ, ее скорость Δ′ и ускорение Δ′′.
На первом графике деформация начинается из точки 0 до -0,4*10-4 м, с максимальной амплитудой равной 0,7*10-4. Затем переходит в затухающие гармонические колебания.
На втором графике представлена скорость деформации. Из начального положения, равного 0 м, скорость деформации изменяется линейно, доходя до максимума в точке 0,11 м/с. После этого скорость изменяется в виде затухающих гармонических колебаний переходя в нулевое значение.
Ускорение деформации на третьем графике изначально колеблется между максимальным и минимальным значениями, которые равны -650 м/с2 и 800 м/с2. Это происходит за время, равное 0,0008 с, и соответствует движению в зазоре или виброудару. После этого начинаются затухающие колебания, с небольшим изломом вначале, который описывает мягкий удар.

Рисунок 2 – графики деформации
На рисунке 10 представлены графики силы трения Fтр, силы полезного сопротивления P, и силы, действующей со стороны замка на иглу. Все силы имеют размерность Н.
На первом графике сила трения колеблется от –0,21 Н до 0,21 Н. Это свидетельствует о том, что в данном месте зона зазора. Со времени t=0,0007 с сила трения постоянна и равна –0,21 Н, скорость убывает в данном случае.
Сила полезного сопротивления, представленная на втором графике, попадает в зазор и колеблется там от –0,1 Н до 0,1 Н. При значении времени t=0,0003 с сила сопротивления становится постоянной и равной –0,1 Н.
На третьем графике сила действовет по гармоническому закону затухающих колебаний. С максимальной амплитудой от 0 до 0,25.
ΙΙ и ΙΙΙ участок – зеркальное отображение графика деформации
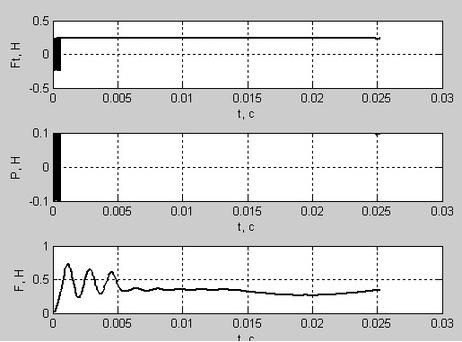
Рисунок 3 – графики сил
При увеличении усилия полезного сопротивления в два раза происходят изменения предоставленные на следующем графике
При увеличение Силы в 2 раза произошли изменения на графике ускорения деформации. Максимальная амплитуда увеличилась в 0,8 раз и колебаний до полной остановки стало больше.