2 Анализ нелинейной системы
2.1 Преобразование структурной схемы нелинейной системы управления вала дизеля
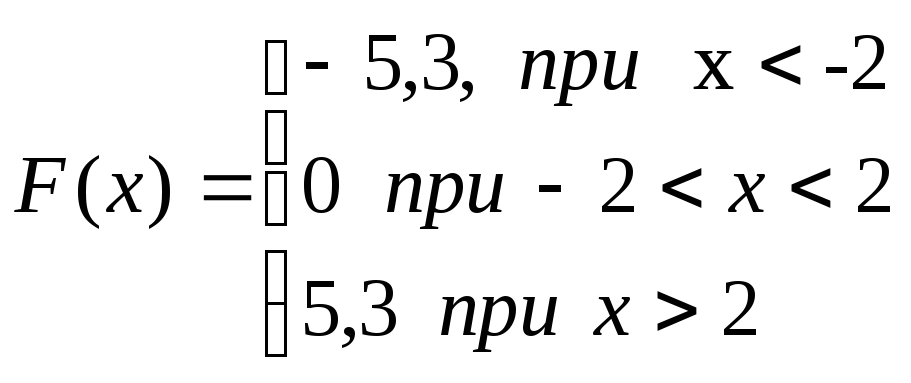
В систему, представленную на рисунке 8, введен нелинейный элемент, имеющий статическую характеристику вида:
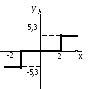
Рисунок 8 – Характеристика нелинейного элемента с зоной нечувствительности
Статическая характеристика нелинейного элемента описывается следующей системой уравнений:
Для исследования нелинейных систем функциональную схему, а, следовательно и структурную схему преобразовывают так, чтобы получить простейшую одноконтурную систему, в которой нелинейный элемент и линейная часть были бы соединены последовательно.
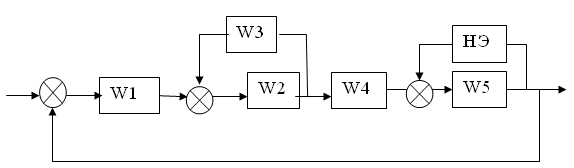
Рисунок 9 – Функциональная схема линейной системы управления вала дизеля с нелинейным элементом
Для построения фазового портрета упростим структурную схему нелинейной системы управления.
Найдем общую передаточную функцию линейной системы, для этого преобразуем в соответствии с правилами преобразования, для этого разобьем структурную схему на участки:
- передаточная функция 1 участка:
![]() ;
;
- передаточная функция 2 участка:
![]() ;
;
- передаточная функция 4 участка является общей передаточной функцией линейной части системы:
Тог да
структурная схема линейной системы с
выделенным нелинейным элементом имеет
вид:
да
структурная схема линейной системы с
выделенным нелинейным элементом имеет
вид:

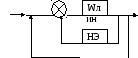
Рисунок 10 – Преобразованная схема нелинейной системы вала дизеля
 Передаточная
функция линейной части системы примет
вид:
Передаточная
функция линейной части системы примет
вид:

 ;
;
2.2 Расчет нелинейной системы методом фазовых траекторий
Для расчета нелинейной системы методом фазовых траекторий характеристическое уравнение передаточной функции линейной части не должно превышать второго порядка. С учетом этого передаточная функция линейной части:

Предположим,
что задающее воздействие
![]() ,
тогда уравнение нелинейной САУ будет
иметь вид:
,
тогда уравнение нелинейной САУ будет
иметь вид:

Характеристика нелинейного элемента разбивается на 3 участка и для каждого из них составляется линейное дифференциальное уравнение:
1 участок:
![]() ,
если
,
если
![]()
![]() ,
если
,
если
![]()
2 участок:
![]() ,
если
,
если
![]()

![]() ,
если
,
если
![]()
3 участок:
![]() ,
если
,
если
![]()
Для
фазовой плоскости введем обычные
координаты
![]() и
и
![]() .
Тогда линейные уравнения для этих
участков примут вид:
.
Тогда линейные уравнения для этих
участков примут вид:
1 участок:
![]() ,
если
,
если
![]()
2 участок:
![]() ,
если
,
если
![]()
3 участок:
![]() ,
если
,
если
![]()
В Mathcad программа получения фазовых траекторий на фазовой плоскости путем непосредственного решения линейных дифференциальных уравнений
будет иметь вид:
- зададим значения коэффициентов:
k=1;
b=2;
c=5.3;
T1=0.27;
T2=1.
 -
зададим начальные значения для векторов
-
зададим начальные значения для векторов
![]() ,
,
![]() ,
,
![]() :
:
![]() ,
,
 ,
,
Определяем
функцию
![]() по трем линейным участкам нелинейной
статической характеристики, задающую
производную:
по трем линейным участкам нелинейной
статической характеристики, задающую
производную:
 ;
;
- найдем матрицы решений для различных начальных условий:
![]()
![]()
![]()
-
построим траектории на фазовой плоскости,
предполагая, что первые столбцы матриц
решения
![]() ,
,
![]() ,
,
![]() содержат точки, в которых ищется решение
дифференциального уравнения, вторые -
содержат точки, в которых ищется решение
дифференциального уравнения, вторые -
![]() ,
,
![]() ,
,
![]() - содержат значения найденного решения,
то есть
- содержат значения найденного решения,
то есть
![]() ,
,
![]() ,
,
![]() и, наконец, третьи столбцы
и, наконец, третьи столбцы
![]() ,
,
![]() ,
,
![]() содер-
содер-
жат
первые производные этого решения, то
есть
![]() ,
,
![]() ,
,
![]() .
.
![]()
![]()
![]()
Приведем
фазовые траектории и переходные процессы
![]() при различных начальных условиях:
при различных начальных условиях:
![]() ;
;
![]() ;
;
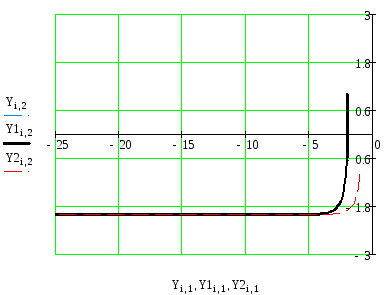

Р исунок
11 - Фазовый портрет для выходных координат
исунок
11 - Фазовый портрет для выходных координат
![]()
По виду фазового портрета, представленного на рисунке 11, можно утверждать, что исследуемая нелинейная система является неадекватной.

Заключение
Цель данной курсовой работы состояла в исследовании и анализе системы автоматического управления вала мощного дизеля в различных её состояниях: линейная система и нелинейная система.
Анализ линейной системы показал, что она является устойчивой, поскольку переходный процесс приходит в установившееся состояние, а также по критерию Гурвица - система устойчива. Но при исследовании переходного процесса прямая оценка качества δ-перерегулирование, равная 0 %, показала, что система является неадекватной. С введением в нее нелинейного элемента её фазовый портрет подтвердил это заключение. Система требует программной коррекции.

СПИСОК ИСПОЛЬЗУЕМЫХ ИСТОЧНИКОВ
1 Основы теории автоматического регулирования: Учебник для машиностроительных специальных вузов/ В.И. Крутов, Ф. М. Данилов, П. К. Кузьмин и др.; Под ред. В. И. Крутова. – 2-е изд., перераб. и доп. – М.: Машиностроение, 1984. - 368 с.: ил.
2 Теория автоматического управления/ Под ред. А.В. Нетушила. – М.: Высшая школа, 1977. – 519 с.: ил.
3 Основы автоматического регулирования/ Под ред. В.С. Пугачева. – М.: Наука, 1974. – 720 с.: ил.
4 Самоучитель MathCad 11 Кирьянов Д.В.. – СПб.: БХВ – Петербург, 2003. – 560с
5 Исследование САУ на фазовой плоскости: Методические указания к лабораторной работе по курсу «Теория автоматического управления», Балаково 2004