

7.10 Схемы скорректированной сау.
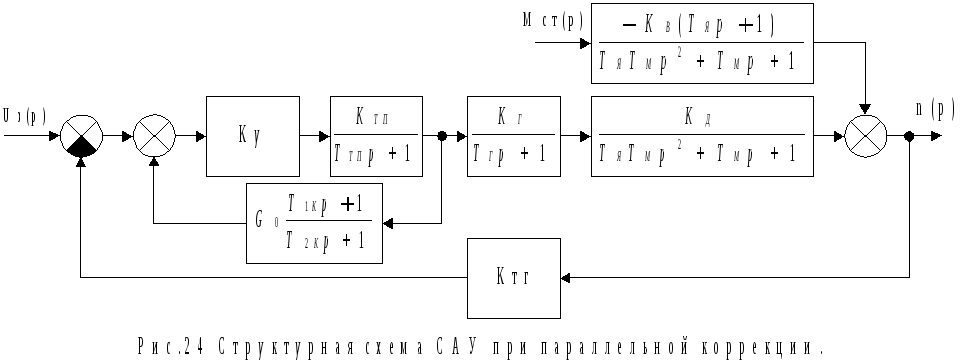
8. Сау с комбинированным принципом управления.

Передаточная функция системы по возмущению [2,с260]:
![]() ,
где:
,
где:
WО(р) – передаточная функция объекта управления по управляющему воздействию;
WOZ(р) – передаточная функция объекта по возмущающему воздействию;
WУ(р) – передаточная функция управляющего устройства;
WК(р) – передаточная функция компенсирующего устройства.
![]() ;
;
![]() .
.
Передаточная функция разомкнутой скорректированной САУ по управляющему воздействию:
![]()
Передаточная функция комбинированной САУ по возмущению:
 .
.
Условие инвариантности стабилизируемой величины n(t) по отношению к возмущению МСТ(t)[2,с.260]:
![]() .
.
Передаточная функция компенсирующего устройства:

9. Оптимизация переходного процесса сау.
Передаточная функция объекта регулирования:
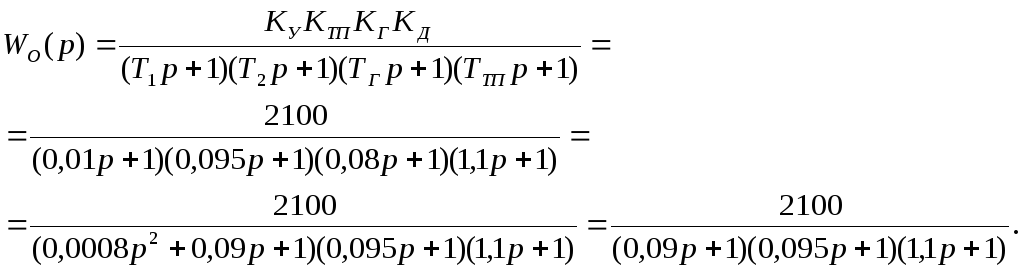
Постоянные времени объекта регулирования: Т01=0,09 с; Т02=0,095 с; Т03=1,1 с.
Для управления объектом 3-гопорядка необходимо применить ПИД-регулятор[2,с.250]с настройкой по критерию симметричного оптимума с полной компенсацией постоянной времени Т02.
Передаточная функция регулятора
![]() ,
где КР=Т03/(2К0Т01)=1,1/(221000,09)=0,0029;
ТИ=4Т01=40,09=0,36
с; ТД=Т02=0,095 с.
,
где КР=Т03/(2К0Т01)=1,1/(221000,09)=0,0029;
ТИ=4Т01=40,09=0,36
с; ТД=Т02=0,095 с.
![]() .
.
Передаточная функция замкнутой системы:

П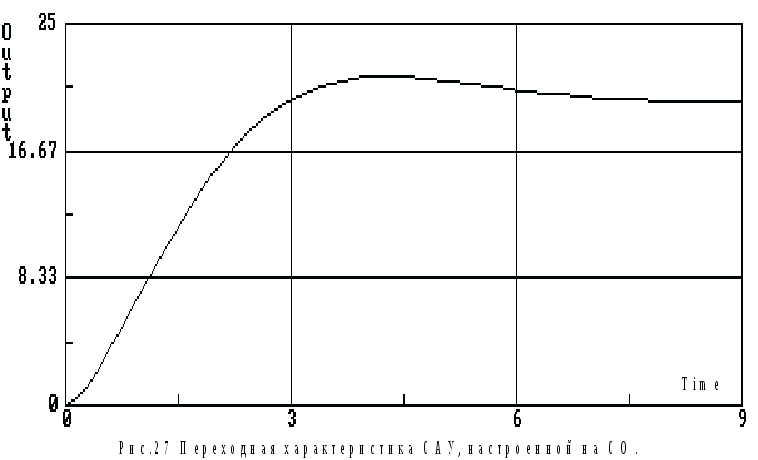 ереходный
процесс системы показан на рис. 27.
ереходный
процесс системы показан на рис. 27.
Качество переходного процесса: перерегулирование =7,7%, время переходного процесса tПП=5,48 с.