Министерство общего и профессионального образования
Российской Федерации
Сибирский государственный индустриальный университет
Кафедра автоматизированного электропривода
и промышленной электроники
КУРСОВАЯ РАБОТА
Проектирование электромеханической САУ
Выполнил: студент гр. АЭП-971
Краснов А. В.
Принял:
Рыбаков А. И.
Новокузнецк
2000
1. Построение нагрузочной характеристики. Выбор двигателя.
|
t, c |
0 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
90 |
100 |
t0 |
|
M, Нм |
0 |
80 |
110 |
50 |
90 |
0 |
-30 |
-60 |
-80 |
-10 |
40 |
2мин |
Рассчитаем значение эквивалентного момента для каждого промежутка времени:
1 )
МЭ1=
)
МЭ1=![]() =
=
=46,2 Нм;
2) МЭ2=
=![]() =
=
=![]()
=95,4 Нм;
3) МЭ3=
=![]() =
=
=![]() =81,9
Нм;
=81,9
Нм;
4) МЭ4=![]() =
=![]() =70,9
Нм;
=70,9
Нм;
5) МЭ5=![]() =52
Нм;
=52
Нм;
6) МЭ6=![]() =17,3
Нм;
=17,3
Нм;
7) МЭ7=![]() =
=![]() =45,8
Нм;
=45,8
Нм;
8) МЭ8=![]() =
=![]() =70,2
Нм;
=70,2
Нм;
9) МЭ9=![]() =
=![]() =49,3
Нм;
=49,3
Нм;
10) МЭ10=![]() =
=![]() =26,5
Нм;
=26,5
Нм;
Суммарный эквивалентный момент:
 Нм.
Нм.
Требуемая мощность двигателя: Р=МЭ=![]() Вт.
Вт.
Из справочника [1]выбираем двигатель Д22, его параметры:
Номинальная мощность Р=8 кВт; напряжение питания UН=220В; номинальный ток якоряIЯ=43,5А; номинальная частота вращенияn=1500об/мин; сопротивление якорной цепи приt=200СRЯ=0,202Ом; число полюсов 2р=4; число витков обмотки возбуждения на полюсwВ=1620; сопротивление ОВ приt=200СRВ=206Ом; номинальный поток Ф=8,0410-3 Вб.
2. Выбор принципа управления
В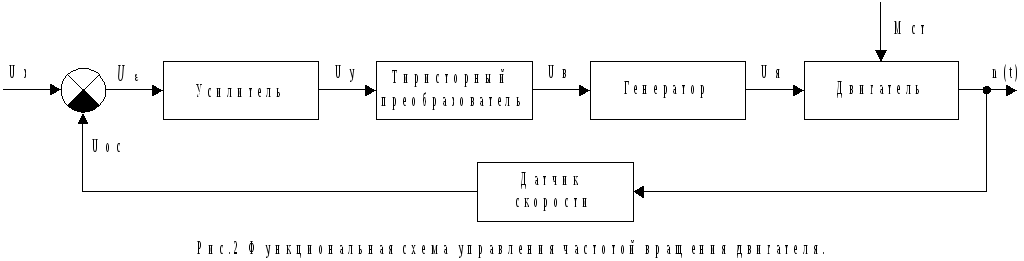 соответствие с заданными показателями
статизма и переходного процесса системы,
а также учитывая простоту реализации,
выбираем принцип управления по отклонению.
Достоинством данной системы является
контроль непосредственно управляемой
величины, что обеспечивает учет всех
возмущений, влияющих на управляемую
величину. Функциональная схема такой
системы приведена на рис. 2.
соответствие с заданными показателями
статизма и переходного процесса системы,
а также учитывая простоту реализации,
выбираем принцип управления по отклонению.
Достоинством данной системы является
контроль непосредственно управляемой
величины, что обеспечивает учет всех
возмущений, влияющих на управляемую
величину. Функциональная схема такой
системы приведена на рис. 2.
3. Определение передаточных функций звеньев системы. Структурная схема сау.
Схема двигателя постоянного тока независимого возбуждения описывается уравнением [2,с.139]:
(ТЯТМр2+ТМр+1)n(t)=КДUЯ(t)-(TЯр+1)КВМСТ(t), где:
Т Я-
электромагнитная постоянная времени,
ТМ- электромеханическая постоянная
времени,n- частота вращения,
КД- коэффициент передачи двигателя
по управляющему воздействию,UЯ-
напряжение на якоря двигателя, КВ-
коэффициент передачи двигателя по
возмущающему воздействию, МСТ-
статический момент.
Я-
электромагнитная постоянная времени,
ТМ- электромеханическая постоянная
времени,n- частота вращения,
КД- коэффициент передачи двигателя
по управляющему воздействию,UЯ-
напряжение на якоря двигателя, КВ-
коэффициент передачи двигателя по
возмущающему воздействию, МСТ-
статический момент.
Выражение передаточной функции двигателя по управляющему воздействию (МСТ=0):

Выражение передаточной функции двигателя по возмущающему воздействию (UЯ=0):

Структурная схема двигателя показана на рис.4.
Г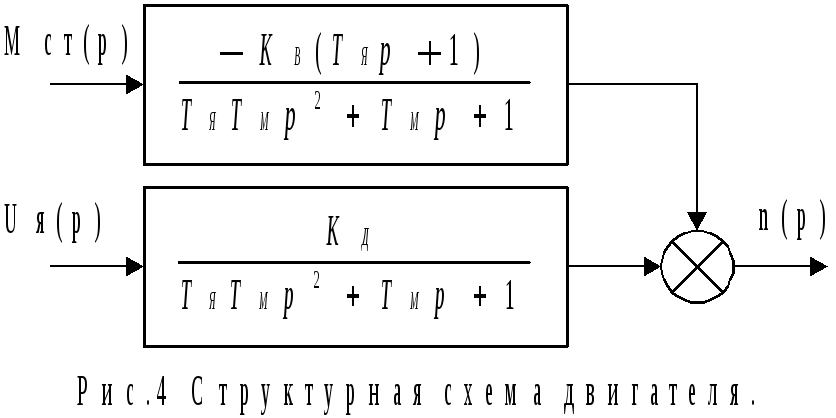 енератор
может быть представлен инерционным
звеном первого порядка
[2,с.138].Передаточная
функция генератора:
енератор
может быть представлен инерционным
звеном первого порядка
[2,с.138].Передаточная
функция генератора:
![]() ,
где:
,
где:
UЯ- напряжение на выходе генератора,UВ- напряжение возбуждения генератора, КГ- коэффициент передачи генератора, ТГ- постоянная времени генератора.
Тиристорный преобразователь также может быть представлен инерционным звеном первого порядка с передаточной функцией:
![]() ,
где:UВ- напряжение
на выходе тиристорного преобразователя,UУ- напряжение
управления, КТП- коэффициент
передачи тиристорного преобразователя,
ТТП- постоянная времени тиристорного
преобразователя.
,
где:UВ- напряжение
на выходе тиристорного преобразователя,UУ- напряжение
управления, КТП- коэффициент
передачи тиристорного преобразователя,
ТТП- постоянная времени тиристорного
преобразователя.
Усилитель представляет собой пропорциональное звено с передаточной функцией:
![]() ,
где КУ- коэффициент передачи
усилителя.
,
где КУ- коэффициент передачи
усилителя.
Датчик скорости (тахогенератор) является практически безынерционным звеном [2,с.138]:
![]() ,
где КТГ- коэффициент передачи
тахогенератора.
,
где КТГ- коэффициент передачи
тахогенератора.
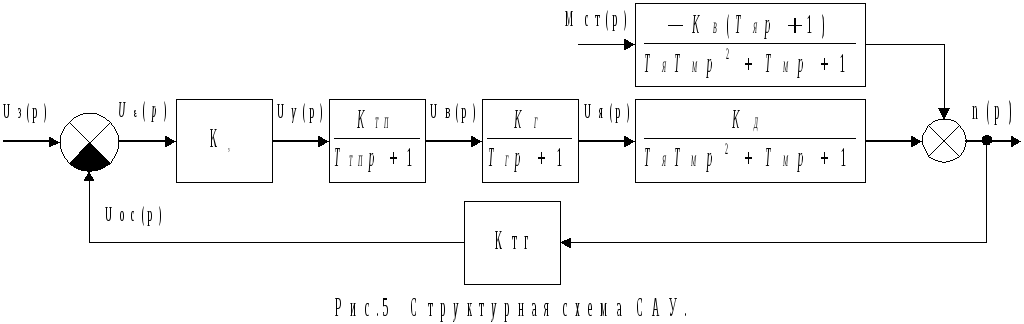
На основе полученных передаточных функций звеньев можно составить структурную схему САУ (рис.5).