7. Оценка запаса устойчивости замкнутой системы по лах и афх разомкнутой системы
![]()
w=tf([125],[0.0033 0.665 1 0]);
margin(w);
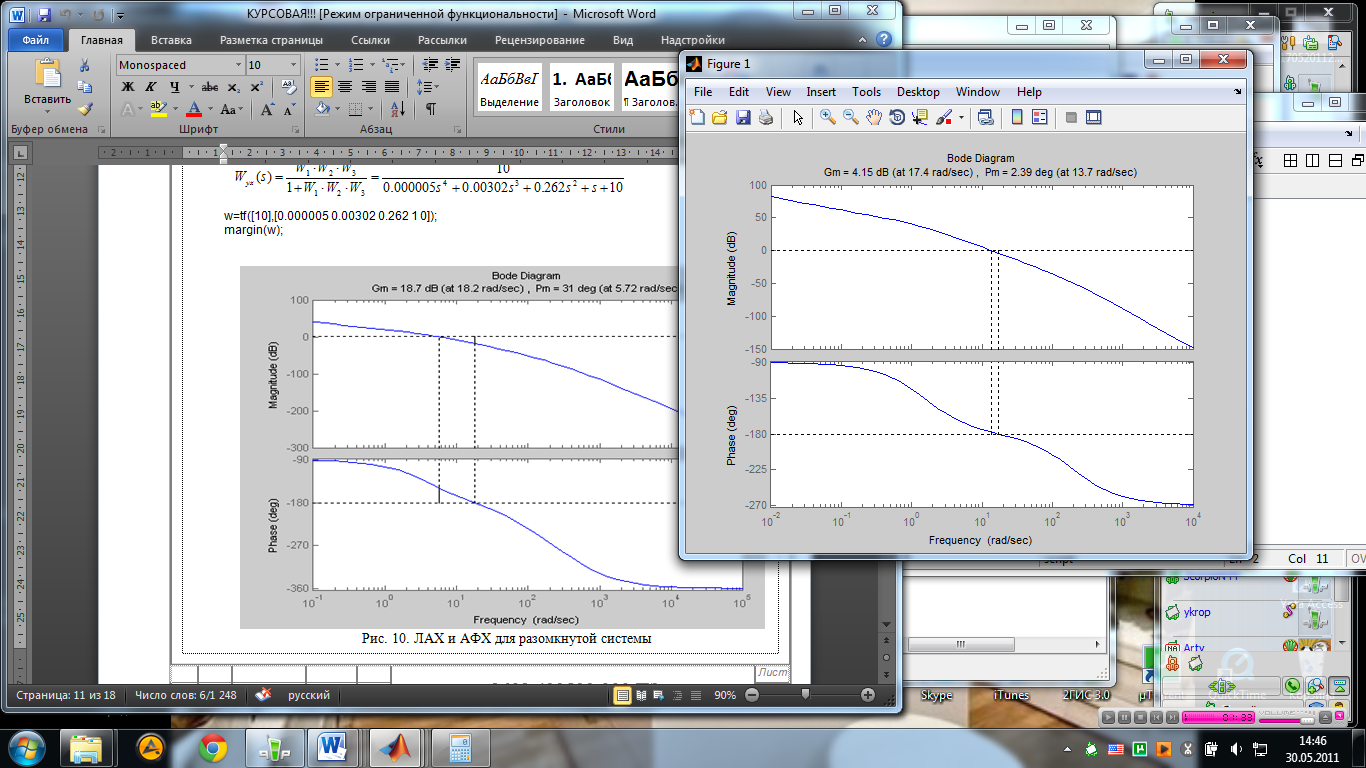
Рис. 13. ЛАХ и АФХ для разомкнутой системы
8. Составление структурной
схемы скорректированной системы, оценка
запаса устойчивости, определение
показателей качества и точности.
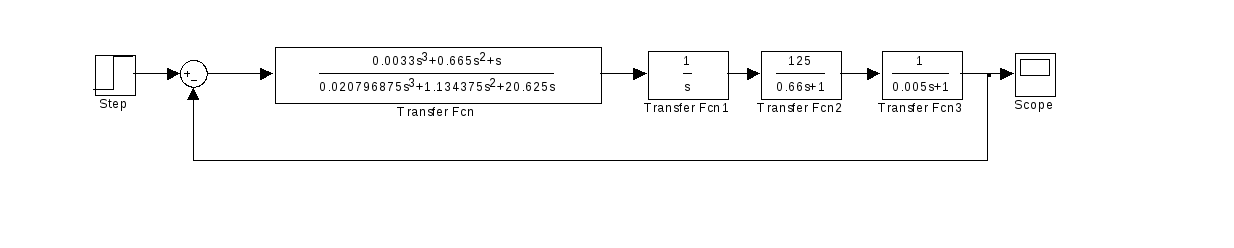
Рис.14. Модель скорректированной системы
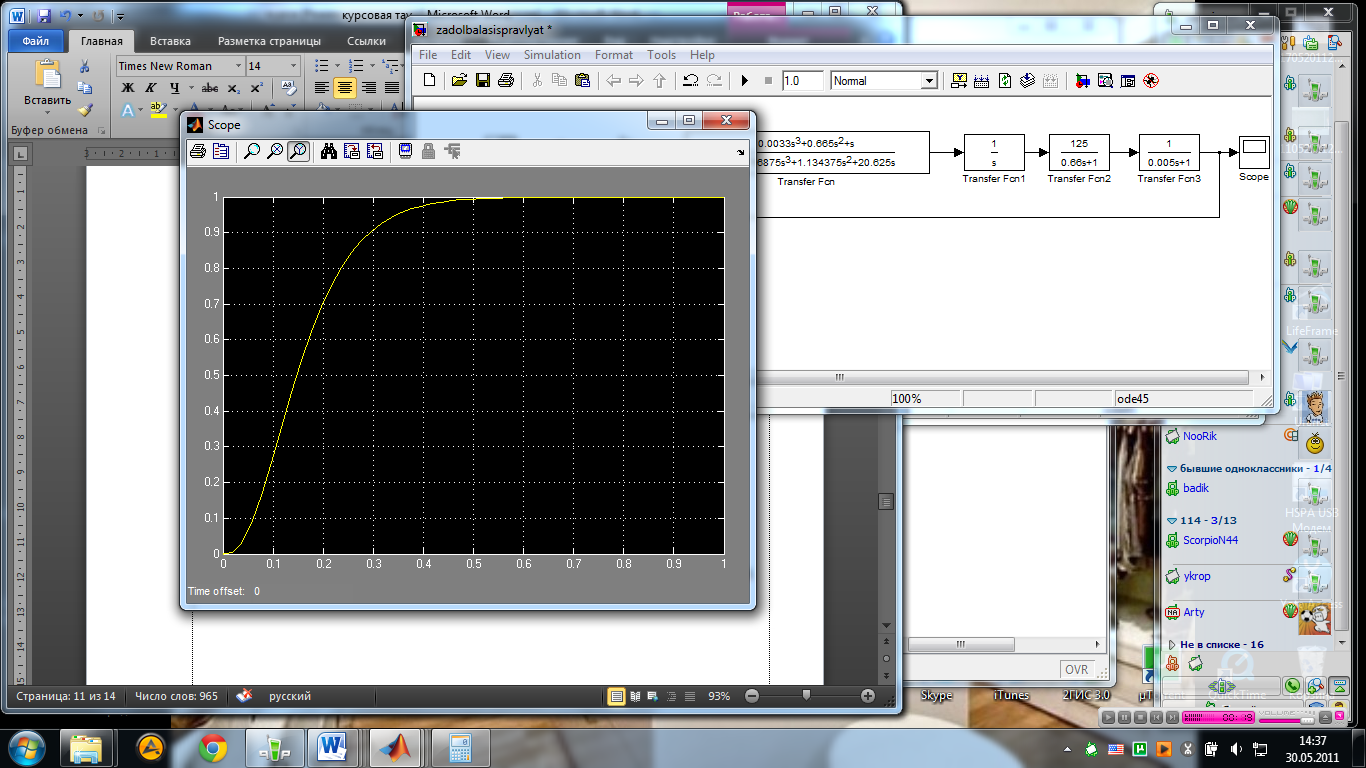
Рис.15. Переходной процесс скорректированной передаточной функции.
Из переходного процесса видно, что система устойчива. Определим показатели качества из рис.11. Время регулирования tрег =0.55с и перерегулирование -

Передаточная функция замкнутой системы по ошибке:
![]()
Из передаточной функции замкнутой системы по ошибке найдем с0,с1,с2
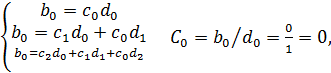
![]()
![]() .
.
9. Построение кривой d-разбиения в плоскости одного параметра
Передаточная функция замкнутой системы имеет вид:
![]()
Характеристическое уравнение замкнутой системы:
![]()
![]()
![]()
![]()
num=[-0.0033 -0.665 -0.1]; den=[1];
w=-75:0.1:75;
apk=freqs(num,den,w);
u=real(apk);
v=imag(apk);
plot(u,v);grid
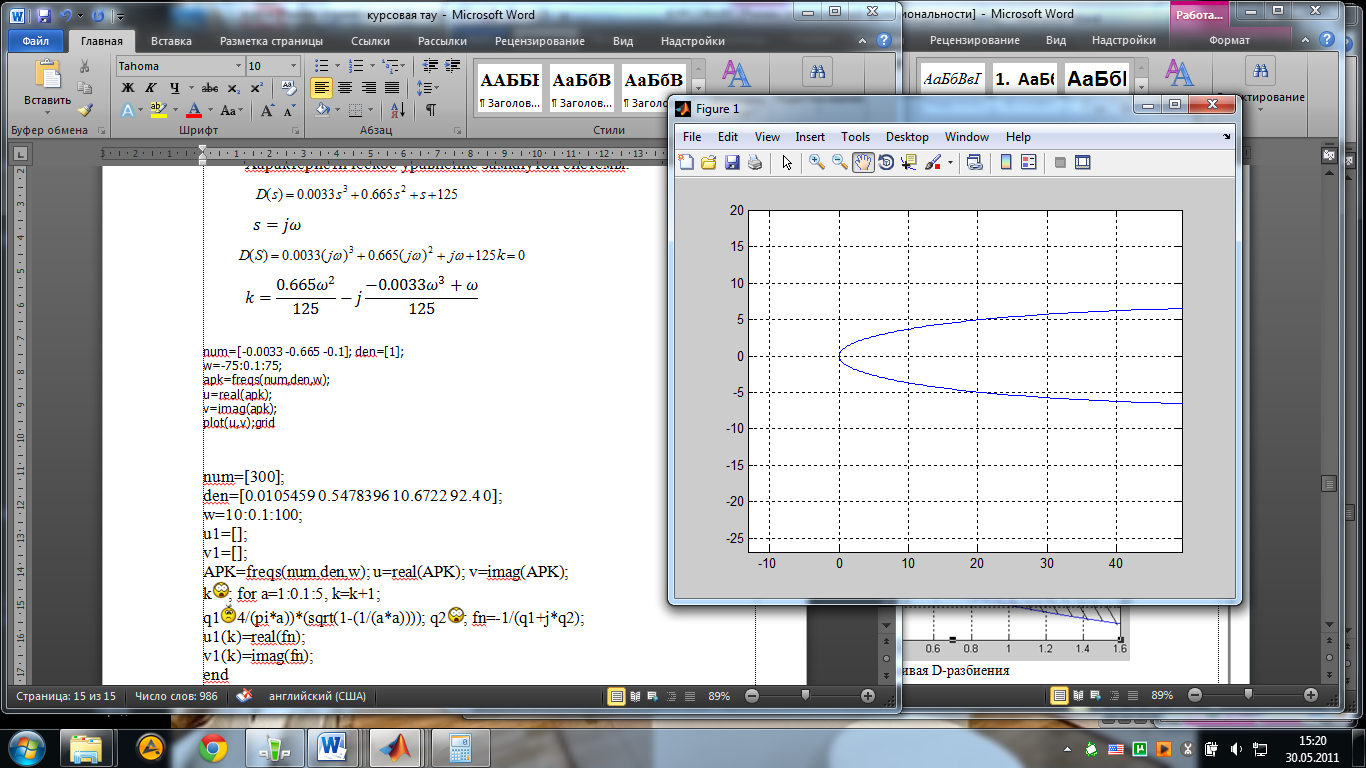
Рис.16 Кривая D-разбиения
При k=1 система устойчива, т.к. все коэффициенты положительны и выполняется неравенство:
![]()
![]()
10. Определение наличия автоколебаний в нелинейной сау.
Построим модель исследуемой САУ с
нелинейным элементом типа реле с зоной
нечувствительности:
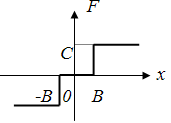
Рис. 17. Нелинейность типа реле с зоной нечувствительности
Для нелинейности типа реле с зоной
нечувствительности при ![]() :
:
![]()
В соответствии с заданием B=C=1.

Рис.18. Модель нелинейной САУ
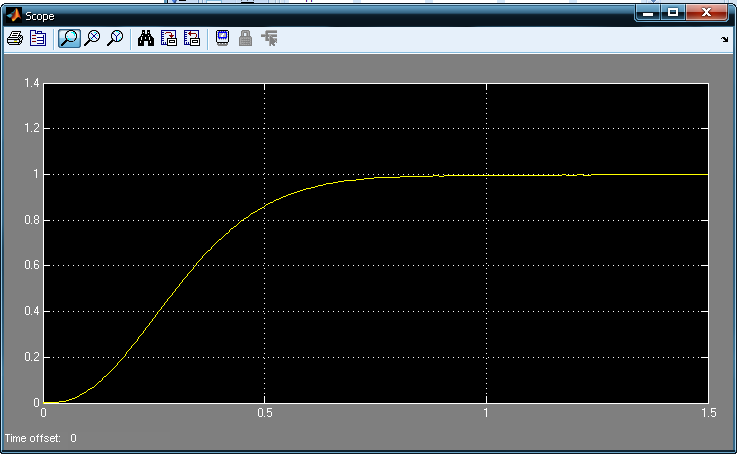
Рис.19.Переходной процесс нелинейной САУ.
Из переходной характеристики видно, что система является устойчивой.
Наличие автоколебания определяем по методу Гольдфарба. Для этого в Matlabстроим АФХ линейной и нелинейной частей.

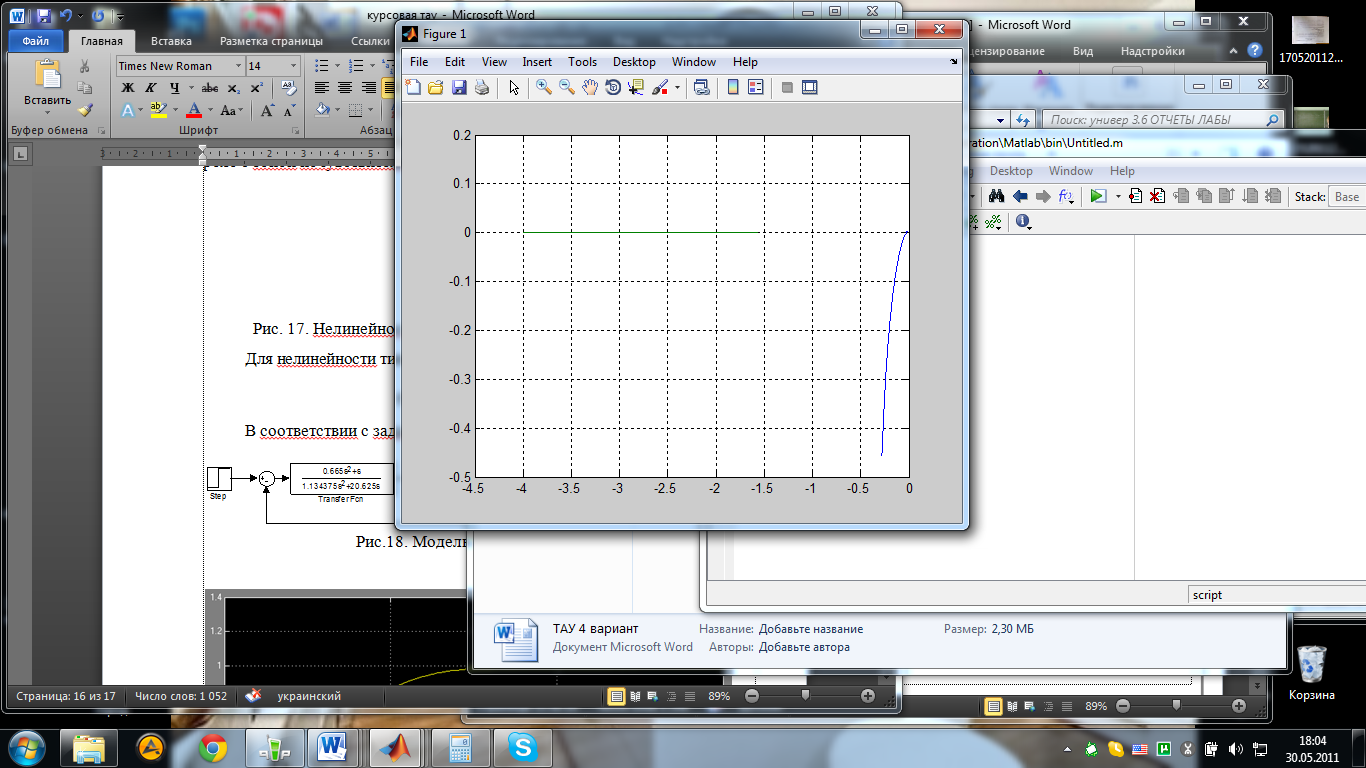
Рис. 20. АФХ линейной и нелинейной частей системы.
АФХ линейной и нелинейной не пересекаются, что свидетельствует об отсутствии периодических движений.
11. Анализ абсолютной устойчивости нелинейной системы.
Анализировать абсолютную устойчивость будем по методу Попова, для этого построим модифицированный годограф, умножив мнимую часть передаточной функции на ω. Построим модифицированный годограф вMatlab.
k=1; w=0; u=[]; v=[];
while w<=100,s=j*w;
f=(0.0302*s^2+2.62*s+10)/(0.00495*s^4+0.114*s^3+1.1752*s^2+3.1*s)
u(k)=real(f);v(k)=imag(f)*w;
w=w+0.01;k=k+1;
end
plot(u,v);grid
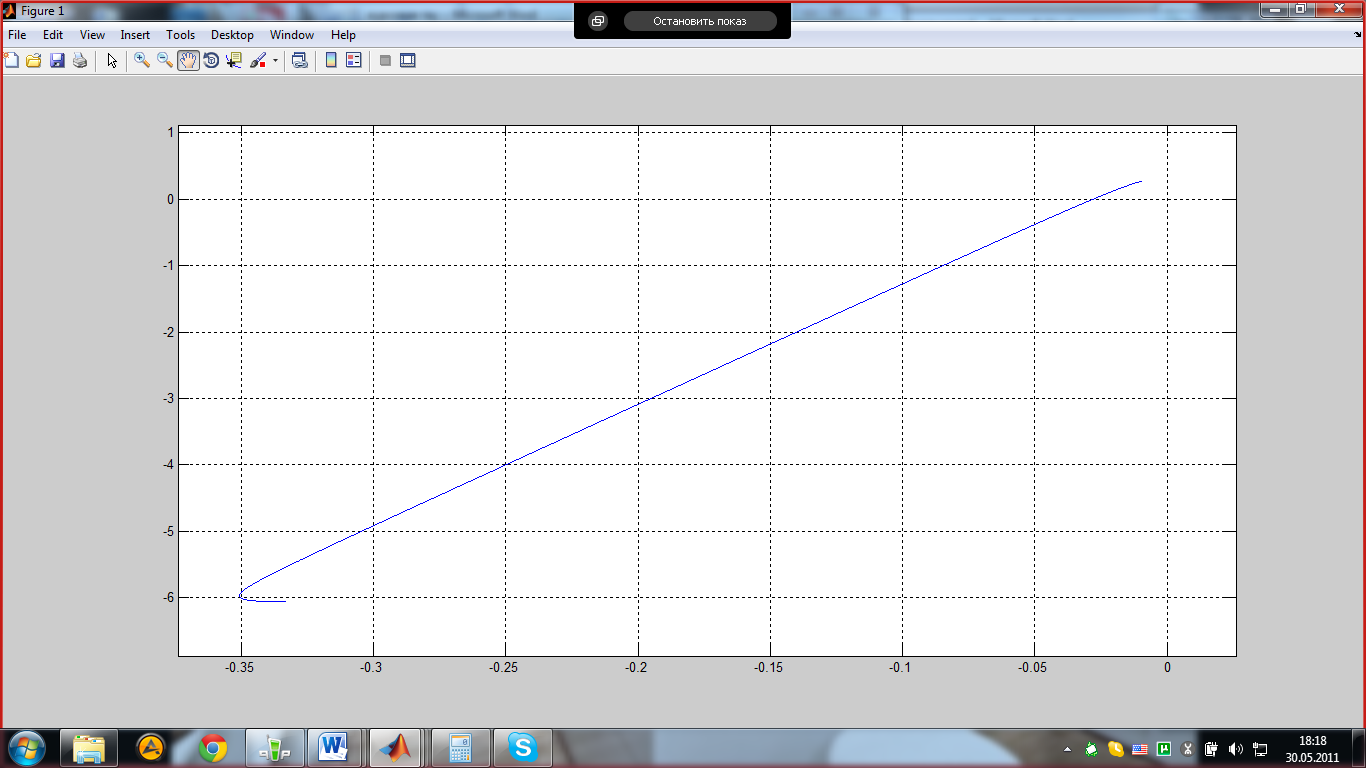
Для нелинейности типа реле с зоной нечувствительности при B=C=1, следовательноk=1.
Система абсолютно устойчива, т.к. через точку -1/K=-1/1=-1 можно провести множество прямых, которые находятся слева от модифицированного годографа.
Заключение
В данной работе было проведено исследование системы углом, в ходе которого были синтезированы корректирующие устройства для достижения требуемых показателей качества. Синтез проводился методом Соколова Н.И.. В результате была получена скорректированная система, полностью удовлетворяющая показателям качества. Также была исследована система с нелинейным элементом типа “ступенька ” на возникновение периодических движений и абсолютную устойчивость. Система с нелинейным элементом устойчива и у нее нет неустойчивых периодических движений.