

Содержание
Введение………………………...………………………………………..…….2
1. Определение передаточных функций разомкнутой и замкнутой систем, по задающему и возмущающему воздействиям……………………………..3
2. Построение модели исследуемой САУ, используя Matlab (Simulink)…4
3. Оценка устойчивости замкнутой нескорректированной системы регулирования по критерию Гурвица. ………………………………………….5
4. Оценка устойчивости замкнутой системы по критерию Михайлова……6
5. Оценка устойчивости замкнутой системы по критерию Найквиста……7
6. Получение корректирующего устройства, обеспечивающего заданные показатели качества работы системы по методу Соколова………………....9
7. Оценка запаса устойчивости замкнутой системы по ЛАХ и АФХ разомкнутой системы……………………………………………………………13
8 Составление структурной схемы скорректированной системы, оценка запаса устойчивости, определение показателей качества и точно-сти……………………………………………………………………………….14
9. Построение кривой D-разбиения в плоскости одного параметра …….15
10. Определение наличия автоколебаний в нелинейной САУ, с нелинейным элементом…………………………………………........................16
11. Анализ абсолютной устойчивости нелинейной системы…………….18
Заключение……………………………………………………………….…19
Список литературы…………………………………………………………20
Введение
В теории автоматического регулирования основными являются проблемы: устойчивости, качества переходных процессов, статической и динамической точности, автоколебаний, оптимизации, синтеза и отождествления .Задачи общей теории автоматического регулирования заключаются в решении перечисленных проблем.
Задача коррекции состоит в повышении динамической точности САР в переходных режимах. Она возникает, поскольку стремление снизить ошибки регулирования в типовых режимах, приводит к необходимости использования таких значений общего коэффициента усиления, при которых без принятия специальных мер (внедрения пассивных звеньев) система оказывается неустойчивой.
Синтез системы имеет конечной целью отыскание:
1) рациональной структуры системы
2) установление оптимальных величин параметров отдельных звеньев.
Задача повышения точности САР обычно
предполагает существенный пересмотр
ее структуры. Возможны замены или
добавления отдельных звеньев в контуре.
1.Определение передаточных функций разомкнутой системы, разомкнутой системы по возмущению, замкнутой системы, замкнутой системы по возмущению, замкнутой системы относительно ошибки по задающему и возмущающему воздействиям.
Передаточная функция разомкнутой системы
![]()
Передаточная функция разомкнутой системы по возмущению
![]()
Передаточная функция замкнутой системы
![]()
Передаточная функция замкнутой системы по возмущению
![]()
Передаточная функция замкнутой системы относительно ошибки по возмущающему воздействию
![]()
Передаточная функция замкнутой системы относительно ошибки по задающему воздействию
![]()
2. Построение модели исследуемой сау, используя Matlab (Simulink).
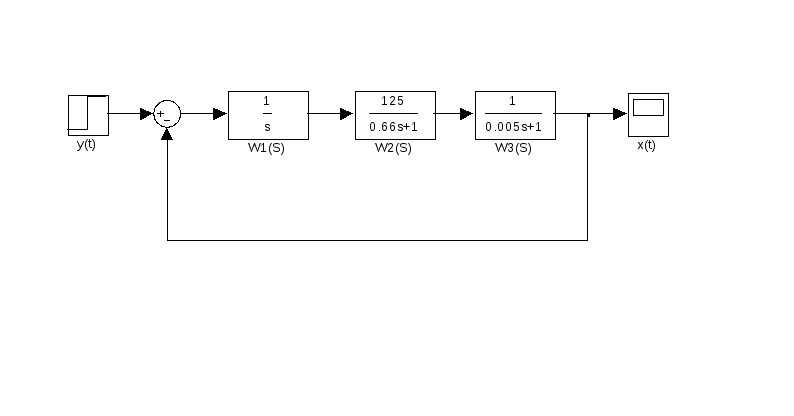
Рис.1 Модель нескорректированной исследуемой САУ

Рис.2. Переходная характеристика нескорректированной исследуемой САУ
Из рисунка 2 видно, что исследуемая САУ устойчива. Определим показатели качества.
![]() ,
,
где
![]() -
макс. значение переходной характеристики
замкнутой САУ
-
макс. значение переходной характеристики
замкнутой САУ![]() ,
,
![]() -
установившееся значение
-
установившееся значение![]() .
.
Время регулирования tрег- минимальная величина, при которой
удовлетворяется условие:![]() ,где
,где![]() - заданная величина ошибки (обыч
- заданная величина ошибки (обыч
 но
но![]() =0.05
=0.05![]() ).
).
![]() =0.05
=0.05![]() =0.05,
=0.05,
![]()
Показатели качества, время регулирования
tрегне удовлетворяет
заданным в условии![]() .
.