

1.3 Определение максимального динамического отклонения аппроксимирующей кривой от заданной в натуральной форме.
Находим максимальное
отклонение аппроксимированной кривой
разгона от натуральной кривой разгона
с запаздыванием
![]() .
.
В программе Razgon.exe рассчитываем ординаты аппроксимирующей кривой разгона (приложение Б). По данным таблицы 4 строим экспериментальную кривую разгона объекта с запаздыванием и аппроксимированную кривую разгона (приложение В). Находим, что максимальное отклонение Y'(t) от Y(t) наблюдается в точке
t = 12 c;
Y'(t) = 2,45
Y(t) = 2,93
Следовательно,
точность аппроксимации не меньше
допустимой (![]() ),
и найденная модель объекта достаточно
точно описывает его динамику.
),
и найденная модель объекта достаточно
точно описывает его динамику.
Находим постоянную
времени объекта. Для этого из точки t
= 6 c
(соответствует времени запаздывания)
к участку максимальной скорости
нарастания температуры проводим
касательную до момента пересечения её
с линией
![]() (T
= 35 °С). Временной участок, заключенный
между точкой пересечения касательной
с
(T
= 35 °С). Временной участок, заключенный
между точкой пересечения касательной
с
![]() и
и![]() ,
равен постоянной времени объекта:
,
равен постоянной времени объекта:
Т =48 – 6 = 42 с.
Результаты исследований объекта.
Объект с запаздыванием является инерционным, статическим (определяется по виду кривой разгона).
Описывается дифференциальным уравнением второго порядка:
 ,
с точностью
,
с точностью
Имеет следующие характеристики:
Коэффициент
передачи
![]()
Постоянная времени Т = 42 с
2. Определение оптимальных настроечных параметров регулятора на заданный по “m” запас устойчивости системы (заданную степень затухания переходного процесса).
Теоретические предпосылки
Запас устойчивости системы может быть охарактеризована величиной степени затухания “Ψ”, которая связана со степенью колебательности системы”m” зависимостью:
![]()
расчет на заданную степень затухания (заданный запас устойчивости m) проводят по расширенным частотным характеристикам – АФХ регулятора и объекта. Структурная схема САР.
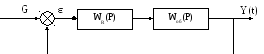
P = (j – m)·ω
Используя критерий Найквиста, согласно которому система будет находиться на границе устойчивости, если АФХ разомкнутой системы пройдет через критическую точку с координатами (1; j0) и с учетом заданного запаса устойчивости m:
А
(1)
Wраз.(m ; jω) = -1
WR.(m ; jω) ·Wоб.(m ; jω) = 1
(в регуляторе происходит перемена знака сигнала).
Представим АФХ регулятора и объекта в показательной форме, тогда:
(2)![]()
Равенство (2) при условии выполнения равенств:
(3)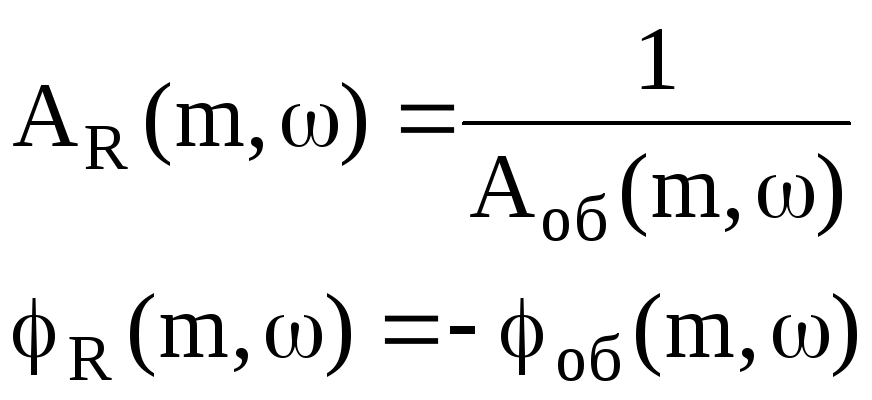

Настроечные параметры регулятора, определяемые системой, будут оптимальными с точки зрения обеспечения заданной степени затухания m, и следовательно, заданного запаса устойчивости САР.
Расчет предусматривает два этапа:
На первом этапе определяется значение параметров регулятора, при которых система будет обладать заданным запасом устойчивости.
На втором этапе из совокупности значений параметров, удовлетворяющих первому требованию, выбираются такие, при которых обеспечивается минимум интегрального критерия качества.
Таким образом, для определения настроечных параметров регулятора необходимо:
Определить расширенные частотные характеристики объекта исходя из его передаточной функции (раздел I) – Аоб(m,ω) и φоб(m,ω).
Определить оптимальные настройки регулятора.