Определение динамических характеристик объекта
Построение кривой разгона с учетом запаздывания
На основе задания
(таблица 2) и данных таблицы 1 находим
координаты кривой разгона объекта в
натуральной форме (таблица 3), при этом
начало кривой разгона смещаем по оси t
на время
![]() .
Получаем экспериментальную кривую
разгона с учетом
.
Получаем экспериментальную кривую
разгона с учетом![]() (таблица
4).
(таблица
4).
Таблица 1. – Экспериментальная кривая разгона.
|
S |
О |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
|
|
0 |
0,07 |
0,25 |
0,43 |
0,58 |
0.78 |
0,80 |
0,84 |
0,89 |
0,92 |
0,94 |
0,96 |
0,97 |
0,98 |
0,985 |
0,99 |
0,995 |
1,00 |
Таблица 2.
|
Вариант |
а, с |
в, °С |
х, % х.р.о. |
|
m |
Тип регулятора |
|
4 |
6 |
35 |
20 |
6 |
0,302 |
П-И регулятор |
Таблица 3. - Экспериментальная кривая разгона в натуральной форме.
|
t |
0 |
6 |
12 |
18 |
24 |
30 |
36 |
42 |
48 |
54 |
60 |
66 |
72 |
78 |
84 |
90 |
96 |
102 |
|
Y |
0 |
2,45 |
8,75 |
15,05 |
20,3 |
24,5 |
27,3 |
29,4 |
31,15 |
32,20 |
32,9 |
33,6 |
33,95 |
34,3 |
34,47 |
34,65 |
34,83 |
35 |
Таблица 4. -
Экспериментальная кривая разгона с
учетом времени
![]() .
.
|
t |
0 |
6 |
12 |
18 |
24 |
30 |
36 |
42 |
48 |
54 |
60 |
66 |
72 |
78 |
84 |
90 |
96 |
102 |
|
Y |
0 |
0 |
2,45 |
8,75 |
15,05 |
20,3 |
24,5 |
27,3 |
29,4 |
31,15 |
32,2 |
32,9 |
33,60 |
33,95 |
34,3 |
34,47 |
34,65 |
34,83 |
В программе Razgon.exe рассчитываем ординаты аппроксимирующей кривой разгона (приложение Б). По данным таблицы 4 строим экспериментальную кривую разгона объекта с запаздыванием и аппроксимирующую кривую разгона (приложение В).
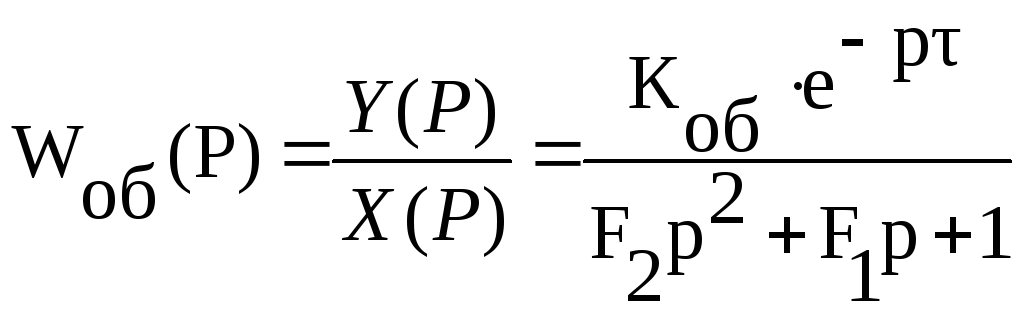
Определение передаточной функции и дифференциального уравнения объекта.
Определяем передаточную функцию объекта по методу площадей (метод Симою). С помощью этого метода находятся численные значения коэффициентов F1 и F2 в передаточной функции. В программе Perfun.exe находим коэффициенты F1 и F2 (приложение А).
Wоб
(Р) =
![]() ,
,
коэффициенты Fn…F1 – имеют смысл и размерность времени.
Ограничиваемся уравнением второго порядка
Wоб
(Р) =
![]()
F![]() связаны с кривой разгона интегральными
соотношениями:
связаны с кривой разгона интегральными
соотношениями:
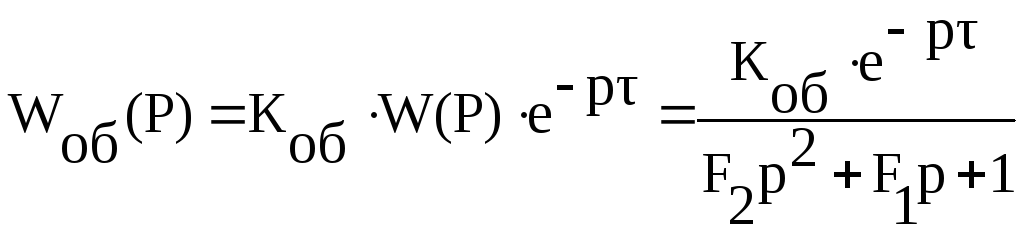
При расчете
исключается из рассмотрения участок
транспортного запаздывания. При наличии
запаздывания в полученную передаточную
функцию вводится множитель е-р![]() .
Объект с запаздыванием можно представить
в виде структурной схемы.
.
Объект с запаздыванием можно представить
в виде структурной схемы.

Тогда

Wоб
(Р) =
![]()
Для определения передаточной функции объекта в численном виде находим значение передаточного коэффициента объекта
![]()
Подставляя численные
значения F1,
F2,
Коб
и
![]() ,
находим передаточную функцию объекта
в численном виде:
,
находим передаточную функцию объекта
в численном виде:
![]()
Находим дифференциальное уравнение объекта, исходя из выражения Wоб (Р)
 отсюда
отсюда
![]()
![]()
Применяя обратное
преобразование Лапласа к выражению, и
подставляя численные значения F1,
F2,
Коб
и
![]() имеем:
имеем:
 ,
где
,
где