

1.7 Построение переходного процесса
Переходная
функция - это реакция системы на
ступенчатое входное воздействие. Для
того, чтобы построить переходный процесс,
используем обратное преобразование
Лапласа от функции вида
![]() .
.
Передаточная функция САУ имеет вид:
![]() ,
,
Для построения графика переходного процесса воспользуемся программой Маthcad.
![]()
,
с
tперех
tсогл
hуст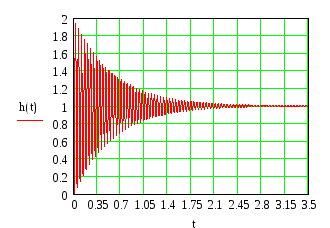


Рисунок 8 – График переходного процесса для системы частотно - импульсного дозирования жидкостей
Определим по графикам (рисунки 6 и 7) прямые оценки качества:
Максимальное значение переходного процесса: hmax=1.95
Установившееся значение переходного процесса: hуст=1
Время
переходного процесса
![]() - время регулирования системы; определяется
как интервал времени от момента приложения
какого-либо воздействия до времени
вхождения в пятипроцентную трубку (
- время регулирования системы; определяется
как интервал времени от момента приложения
какого-либо воздействия до времени
вхождения в пятипроцентную трубку (![]() ).
tперех=
c.
).
tперех=
c.
Значение
перерегулирования:![]()
Время достижения макс. значения переходного процесса: tmax=0,023 с
Время
первого согласования
![]() -
время, за которое регулируемая величина
первый раз достигает своего установившегося
значения.
-
время, за которое регулируемая величина
первый раз достигает своего установившегося
значения.
![]() =2.6
с.
=2.6
с.
Колебательность n – число колебаний системы от момента воздействия на нее до перехода в установившееся состояние. n=58
hmax
,
с
tmax




Рисунок 9 – График переходного процесса для системы частотно - импульсного дозирования жидкостей
1.8 Построение амплитудно-частотной характеристики
Косвенные оценки качества системы управления определяются из графика амплитудно-частотной характеристики.
Для
построения графика АЧХ необходимо
сначала в передаточной функции САУ
заменить
![]() ,
получим:
,
получим:

![]()
Определим выражение для амплитудно-частотной характеристики и построим её график.

,
Гц
Amax
ωр
ωср
А(0)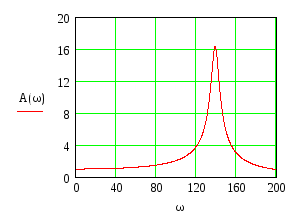








Рисунок 10 - График АЧХ системы частотно - импульсного дозирования жидкостей
Из графика АЧХ определим косвенные характеристики:
![]() – максимальная
амплитуда;
– максимальная
амплитуда;
![]() – амплитуда
при нулевой частоте;
– амплитуда
при нулевой частоте;
Показатель
колебательности
![]() ;
;
![]() – резонансная
частота (частота, при которой АЧХ
достигает максимального значения);
– резонансная
частота (частота, при которой АЧХ
достигает максимального значения);
![]() – частота
среза (частота, при которой амплитуда
равна единице);
– частота
среза (частота, при которой амплитуда
равна единице);
![]() – полоса
пропускания (полоса, при которой значение
амплитуды больше, чем
– полоса
пропускания (полоса, при которой значение
амплитуды больше, чем
![]() );
);
![]() =0.045
– период колебаний;
=0.045
– период колебаний;
![]() – величина
перерегулирования;
– величина
перерегулирования;
![]() =0.063
с,
=0.063
с,
![]() =0.135
с – время регулирования.
=0.135
с – время регулирования.
![]()
![]() с.
с.
1.9 Определение запаса устойчивости
Для определения запасов устойчивости по фазе и по амплитуде необходимо построить графики ЛАЧХ И ЛФЧХ на одних и тех же осях, причем ЛФЧХ строится ниже ЛАЧХ.
График ЛАЧХ строим по следующей функции:
![]() .
.
График ЛФЧХ строим по следующей формуле:
![]() .
.
Для построения графиков воспользуемся программой Matlab.
ΔL
Δφ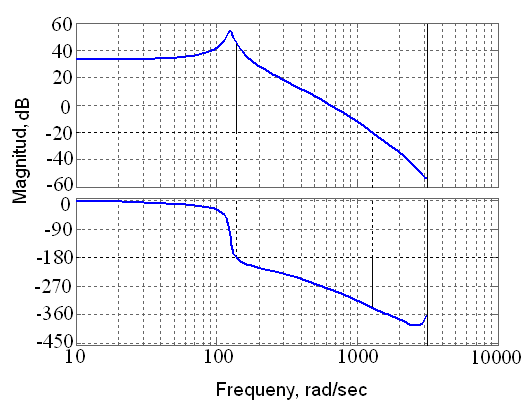






Р исунок
11 - Графики ЛАЧХ и ЛФЧХ
исунок
11 - Графики ЛАЧХ и ЛФЧХ
Определим запасы устойчивости по фазе (φ) и по амплитуде (L):
Δφ = 93.20;
![]()
Аппроксимируем ЛАЧХ, изображенную на рисунке 11:
+20
Дб/дек
0
Дб/дек
-60
Дб/дек
-40
Дб/дек
ω1
ω2
ω3








Рисунок 12 – Аппроксимация ЛАЧХ
Из рисунка видно, что передаточная функция в общем виде имеет вид:
Для того, чтобы записать полученную передаточную функцию системы в численном виде, необходимо рассчитать T1, T2, T3 по формуле:
![]()
Частота
![]() находится из рисунка 9. Для того чтобы
её определить, нужно опустить перпендикуляр
с точки пересечения аппроксимированных
участков.
находится из рисунка 9. Для того чтобы
её определить, нужно опустить перпендикуляр
с точки пересечения аппроксимированных
участков.
Таким
образом, из рисунка видно, что
![]() 75,
75,
![]() 120,
120,
![]() 900
900
Следовательно, передаточная функция системы в численном виде будет иметь вид:

2 Исследование НЕлинейной части системы
2.1 Техническое задание для нелинейной части системы
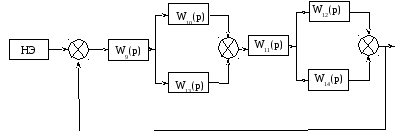
W9(p)- Передаточная функция резервуара с жидкостью;
W10(p)- Передаточная функция клапана;
W11(p)- Передаточная функция закрытого ресивера;
W12(p)- Передаточная функция клапана;
W13(p)- Передаточная функция клапана;
W14(p)- Передаточная функция клапана;
НЭ - нелинейный элемент.
Рисунок 13 – Структурная схема нелинейной системы
Передаточная функция резервуара с жидкостью:
W9 (р) = kб / Тр+1 = 5/0.5р+1,
где Т - постоянная времени импульсов, Т = 0.5 с;
kб - передаточный коэффициент резервуара с жидкостью (бака), kб = 5
Передаточная функция закрытого ресивера:
W11 (р) = kр / Тр+1 = 7/ 0.7р+1,
где Т - постоянная времени ресивера, Т = 0.7 с;
kр - передаточный коэффициент ресивера, kр = 7
Передаточная функция клапана 10:
W10(р) = kкл = 6,
где kкл - передаточный коэффициент клапана 10
Передаточная функция клапана 13:
W13(р) = kкл = 6,
где kкл - передаточный коэффициент клапана 13
Передаточная функция клапана 12:
W12(р) = kкл = 8,
где kкл - передаточный коэффициент клапана 12
Передаточная функция клапана 14:
W14(р) = kкл = 8,
где kкл - передаточный коэффициент клапана 14.
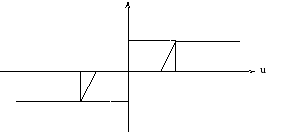
График, описывающий нелинейный элемент приведен на рисунке 11. При величине входного сигнала в интервале от -4.5 до +4.5 выходного сигнала нет. Звено такой сигнал не чувствует, поэтому отрезок (-4.5;4.5) называют зоной нечувствительности. Характеристика описывается следующим выражением:

г
x
2.5
-4.5
7
4.5
-7
-2.5
Рисунок 14 – Статическая характеристика звена с зоной нечувствительно-
сти
2.2 Упрощение нелинейной системы
Применяя правила преобразования структурных схем, упростим линейную часть нашей схемы.
Выражение для общей передаточной функции линейной части:
![]()
Общая схема системы частотно-импульсного дозирования жидкостей свободного истечения, включая нелинейный элемент примет вид, показанный на рисунке 12.

Рисунок 15 - Вид структурной схемы, включающей линейную и нелинейную части
Введем вынужденную обратную связь.

Рисунок 16 - Вид структурной схемы с обратной связью
2.3 Построение фазового портрета нелинейной системы
Передаточная
функция есть
![]() или
или
![]() ,
,
где
![]() -передаточная
функция линейной системы;
-передаточная
функция линейной системы;
Подставляя в эту формулу значение передаточной функции получим:
![]()
Приведённую формулу можно записать в виде:
![]()
Введем
замену
![]() :
:
![]()
Для того чтобы построить фазовый портрет, необходимо, чтобы степень числителя и знаменателя не превышала вторую степень и наше уравнение удовлетворяет этим условиям.
Так
как в качестве нелинейного элемента
используется звено с зоной нечувствительности
со статической характеристикой,
представленной на рисунке 11, то подставляя
значение
![]() для двух участков, получим систему:
для двух участков, получим систему:


Создадим матрицу для решения дифференциального уравнения.
В данной матрице реализовано условие перехода от одного уравнения к другому. Зададим матрицы для пяти начальных условий:





Возьмём количество точек равным 10000 и конечное время интегрирования 100, то матрица решений запишется как:
![]()
![]()
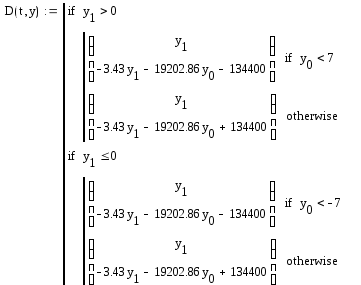

Рисунок 17 - Фазовый портрет нелинейной системы
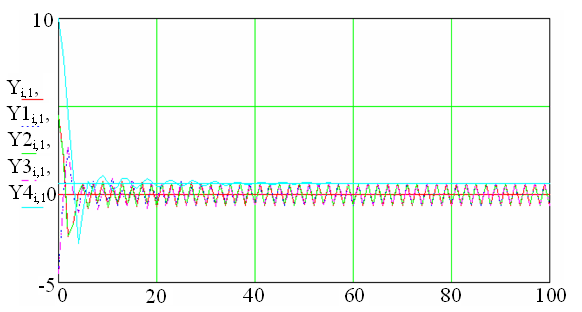
Рисунок 18 – Переходный процесс
Вывод:
на рисунке 14 представлен фазовый портрет
нелинейной системы. Это типовой вид
кривой. Переключение с одного уравнения
на другое происходит в точке
![]() =
7, при x>0,
и в точке
=
7, при x>0,
и в точке
![]() =
-7, при x
<0 . Характер фазовой линии свидетельствует
об устойчивом состоянии системы. Система
производит автоколебания.
=
-7, при x
<0 . Характер фазовой линии свидетельствует
об устойчивом состоянии системы. Система
производит автоколебания.
Введение в систему нелинейного элемента ухудшило ее быстродействие, так как увеличилось время регулирования переходного процесса.