курсовая работа / Тау12 / тау1
.docПРАКТИЧЕСКАЯ РАБОТА ПО ТАУ.
Задание: спроектировать систему управления уровнем жидкости в баке.
Структурная схема САУ:
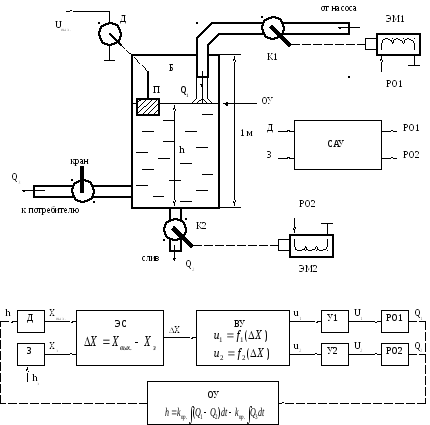
Система состоит из бака Б высотой 1 м и объемом 1 м3, заполненного жидкостью до уровня h, который может изменяться в пределах 0 h 1 м, и поплавкового датчика уровня, состоящего из поплавка П, механически связанного с ползунком потенциометрического датчика Д. Коэффициент преобразования датчика kд = 1 В/м, пределы измерений 0 1 м. От бака отходят 2 трубы: к потребителю и на слив (для опорожнения бака), и подходит 1 труба – от насоса (для заполнения бака). Труба, идущая к потребителю играет роль возмущающего фактора, непредсказуемо изменяющего уровень жидкости в баке. На каждой трубе находятся краны для изменения потока жидкости. Для управления уровнем жидкости в баке используются регулирующие органы РО1 и РО2. РО1 представляет собой электромагнит ЭМ1, якорь которого механически связан с задвижкой крана К1, управляющего подачей жидкости в бак. Аналогично, РО2 состоит из электромагнита ЭМ2 и крана К2, установленного на трубе слива. Диапазон управляющих напряжений регуляторов 0 20 В, ему соответствует диапазон изменений потока 0 0,2 м3/с. Потребление изменяется в пределах 0 Q3 0,1 м3/с. Для установки требуемого уровня жидкости используется потенциометрический задатчик, напряжение на выходе которого изменяется от 0 до 1 В, что соответствует изменению уровня жидкости от 0 до 1 м.
Система работает следующим образом. Текущий уровень жидкости h [м] фиксируется датчиком Д и преобразуется в выходной сигнал Xвых. = kд h [В], где kд = 1 В/м. При помощи задатчика З задается требуемый уровень hз [м], которому соответствует сигнал Xз = kз hз [В], где kз = 1 В/м. Сигналы с датчика и задатчика подаются на входы элемента сравнения ЭС, который вычисляет их разность и формирует разностный сигнал X = Xвых. – Xз [В]. Этот сигнал поступает на вычислительное устройство ВУ, вычисляющее управляющие сигналы u1 и u2: u1 = f1(X) [В], u2 = f2(X) [В]. Управляющие сигналы подаются на усилители У1 и У2 с коэффициентом усиления kу [1], которые их усиливают до величины, способной управлять регулирующими органами: U1 = kу u1 [В], U2 = kу u2 [В], где kу = 20. Усиленные управляющие сигналы поступают на регулирующие органы РО1 и РО2, которые преобразуют их в изменения потоков жидкости, втекающих и вытекающих из бака: Q1 = kр U1 [м3/с], Q2 = kр U2 [м3/с], где коэффициент преобразования регулятора kр = 0,01 (м3/с)/В. Уровень жидкости в баке равен h = kпр.(Q1 – Q2)dt – kпр.Q3dt, где kпр. = 1 м/м3 – коэффициент преобразования объектом управления ОУ управляющей величины в выходную; kпр.Q3dt = z.
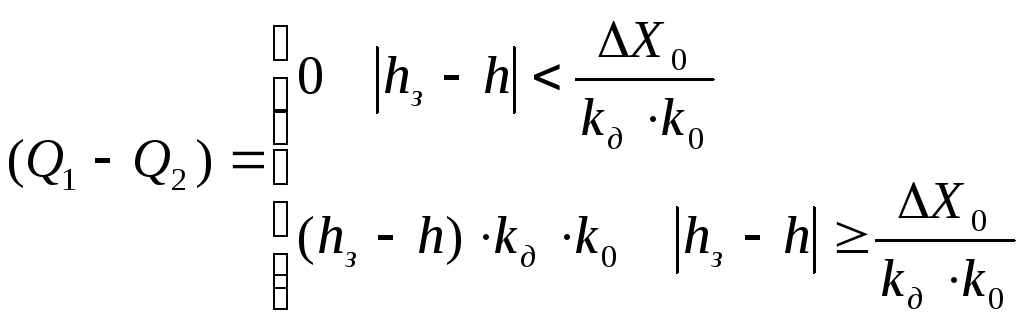
В системе используется пропорциональный закон регулирования:
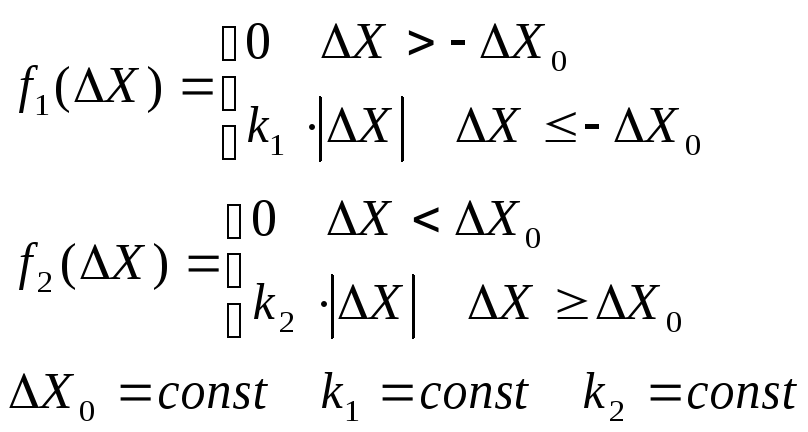
k1 = k2 = 1,
X0 = 0,05 В – порог чувствительности.
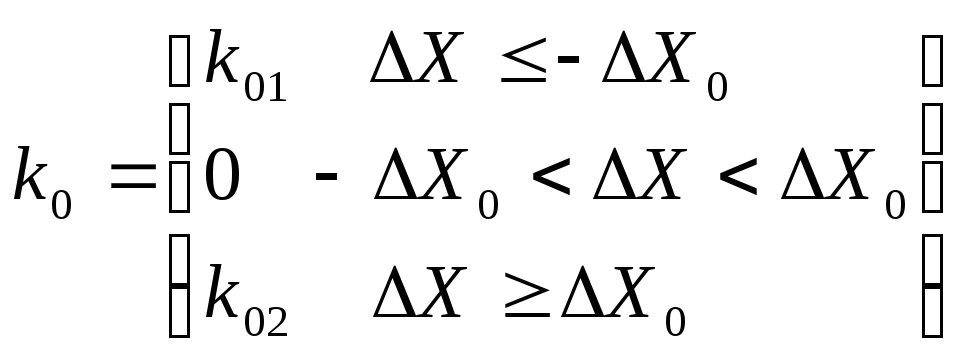
k01 = kр1 kу1 k1 = 0,2 (м3/с)/В.
k02 = kр2 kу2 k2 = 0,2 (м3/с)/В.
Q1 = |X| k01, X -X0 | Q1 = 0.
Q2 = |X| k02, X X0 | Q2 = 0.
 .
.
Т.к.
k01
= k02
= k0,
 .
.
 .
.
Xвых. = kд h.
Xз = kз hз.
Т.к.
kд
= kз,
 .
.
k = kпр. kд k0 = 0,2 с-1.
X0 0.
![]() .
.
![]() .
.
![]() .
.
![]() .
.
![]() .
.
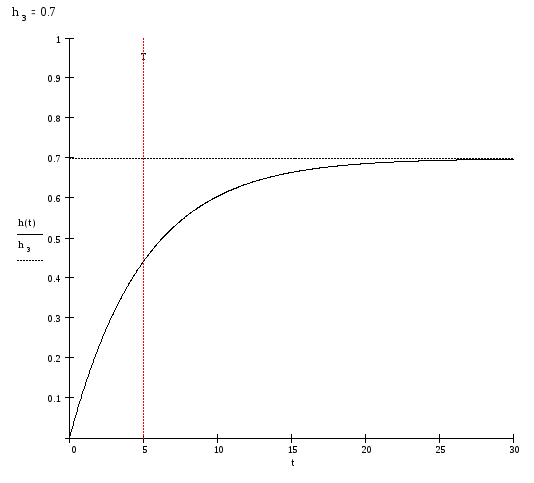
![]() ,
h0
– уровень в начальный момент времени.
,
h0
– уровень в начальный момент времени.
T = 1/k = 5 с – постоянная времени системы.