

2.2 Прямые оценки качества системы регулирования.
При исследовании систем автоматического регулирования приходится решать задачу обеспечения требуемых показателей качества переходного процесса. Показатели качества, определяемые непосредственно по кривой переходного процесса, называют прямыми оценками качества. Кривая переходного процесса может быть получена теоретически или экспериментально.
К прямым оценкам качества относят [1,c.48]:
Перерегулирование σ, % - максимальное отклонение переходной характеристики от установившегося значения выходной величины.
![]() , (2.2.1)
, (2.2.1)
А1 –значение первого максимума,
Y() – установившееся значение выходной величины,
А1=0,36 и Y(∞)=1
![]()
![]() (2.2.2)
(2.2.2)
Динамический коэффициент регулирования RД, %
![]() , (2.2.3)
, (2.2.3)
КОБ – коэффициент передачи объекта ( КОБ = 2),
![]() (2.2.4)
(2.2.4)
Статическая ошибка СТ
εСТ = S(t) – y(∞) (2.2.5)
S(t) – единичное ступенчатое воздействие ( S(t) = 1),
εСТ = 1 - 1 = 0 (2.2.6)
Степень затухания Ψ
![]() , (2.2.7)
, (2.2.7)
А2 - значение второго максимума,
![]() (2.2.8)
(2.2.8)
Время регулирования tp – это время, по истечении которого отклонение регулируемой величины от установившегося состояния не будет превышать некоторой наперед заданной величины . Обычно
=0,05· Y() (2.2.9)
=0,05·1=0,05 tp = 130c (рисунок 3.1).
Максимальная динамическая ошибка
А1 = 0,36
2.3 Переходный процесс в аср по каналу регулирующего воздействия.
Для построения переходного процесса нужно составить передаточную функцию системы по каналу регулирующего воздействия и по программе Mathcad рассчитать ВЧХ системы.
 (2.3.1)
(2.3.1)
 Для
упрощения расчета введем некоторые
коэффициенты:
Для
упрощения расчета введем некоторые
коэффициенты:
A=
![]() ,
(2.3.2)
,
(2.3.2)
B=
![]() (2.3.3)
(2.3.3)
C=
![]() ,
(2.3.4)
,
(2.3.4)
D=
![]() ,(2.3.5)
,(2.3.5)
Тогда
получим
![]() (2.3.6)
(2.3.6)
![]() (2.3.7)
(2.3.7)
Результаты расчета ВЧХ в АСР по каналу регулирующего воздействия представлены в таблице 2.3.1.
Таблица 2.3.1 – Результаты расчета ВЧХ системы
|
|
Re( |
|
0 |
0 |
|
0.02 |
0.0673 |
|
0.04 |
0.14752 |
|
0.06 |
0.19113 |
|
0.08 |
0.07312 |
|
0.1 |
-0.09519 |
|
0.12 |
-0.09543 |
|
0.14 |
-0.07125 |
|
0.16 |
-0.05262 |
|
0.18 |
-0.03973 |
|
0.2 |
-0.03067 |
|
0.22 |
-0.02413 |
|
0.24 |
-0.01926 |
|
0.26 |
-0.01555 |
|
0.28 |
-0.01266 |
|
0.3 |
-0.01036 |
|
0.32 |
-8.50596*10-3 |
|
0.34 |
-6.99335*10-3 |
|
0.36 |
-5.7443*10-3 |
|
0.38 |
-4.70309*10-3 |
|
0.4 |
-3.82812*10-3 |
По данным таблицы 2.3.1 построим график переходного процесса представленный на рисунке 2.3.1.

Рисунок 2.3.1 – ВЧХ системы построенный по данным таблицы 2.3.1
Переходный процесс по каналу регулирующего воздействия рассчитаем по формуле:
![]()
 (2.3.8)
(2.3.8)
где 0,4 частота среза определяемая из графика ВЧХ изображенного на рисунке 2.3.1.
Результаты расчета переходного процесса АСР по каналу регулирующего воздействия представим в таблице 2.3.2.
Таблица 2.3.2 – Результаты расчета переходного процесса АСР по каналу регулирующего воздействия
|
Время t, с |
Ордината y(t) |
|
0 |
0 |
|
10 |
0.021 |
|
20 |
0.086 |
|
30 |
0.129 |
|
40 |
0.124 |
|
50 |
0.083 |
|
60 |
0.035 |
|
70 |
3.341*10-3 |
|
80 |
-5.53*10-3 |
|
90 |
1.158*10-3 |
|
100 |
0.012 |
|
110 |
0.017 |
|
120 |
0.015 |
|
130 |
9.152*10-3 |
|
140 |
2.75*10-3 |
|
150 |
-9.679*10-4 |
|
160 |
-1.322*10-3 |
|
170 |
1.384*10-4 |
|
180 |
1.681*10-3 |
|
190 |
2.372*10-3 |
|
200 |
1.908*10-3 |
График транспортного запаздывания, то есть начального участка переходного процесса изображен на рисунке 2.3.2 по данным таблицы 2.3.2.
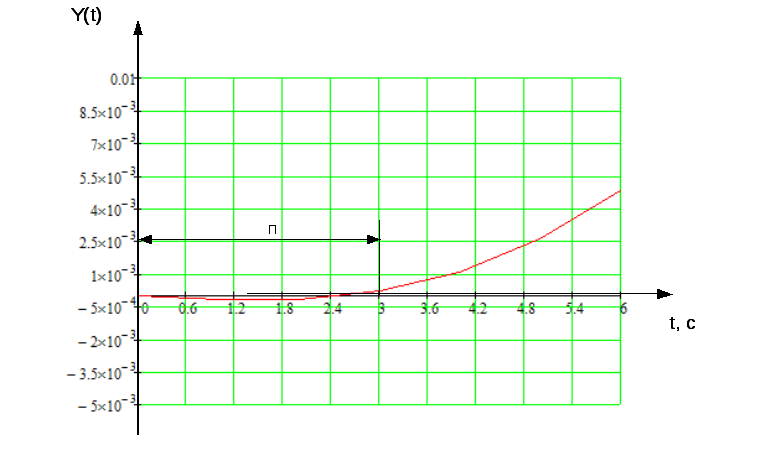
Рисунок
2.3.2 – транспортное запаздывание
![]()
Построим по данным таблицы 2.3.2 график переходного процесса АСР по каналу регулирующего воздействия и изобразим его на рисунке 2.3.3.

Рисунок 2.3.3 – переходный процесс в замкнутой АСР при возмущении f, идущего по каналу регулирующего воздействия