

СОДЕРЖАНИЕ
с
ВВЕДЕНИЕ………………………………………………………………………………3
1.РАСЧЕТ ОПТИМАЛЬНЫХ ПАРАМЕТРОВ НАСТРОЙКИ……………………….4
1.1 Расчет и построение границы заданного запаса устойчивости АСР…………..4
1.2 Обоснование и выбор оптимальных параметров настройки регулятора……...8
2. РАСЧЕТ И ПОСТРОЕНИЕ ПЕРЕХОДНОГО ПРОЦЕССА В АСР……………….10
2.1 Переходный процесс в замкнутой АСР по каналу задающего воздействия….10
2.2 Прямые оценки качества системы регулирования………………………….......14
2.3 Переходный процесс в замкнутой АСР по каналу регулирующего воздействия………………………………………………………………………………………...15
2.4 Прямые оценки качества системы регулирования……………………………...19
ЗАКЛЮЧЕНИЕ……………………………………………………………….………….20
СПИСОК ЛИТЕРАТУРЫ……………………………………………………………….21
ВВЕДЕНИЕ
В данной курсовой работе для системы регулирования (рисунок 1) необходимо выполнить:
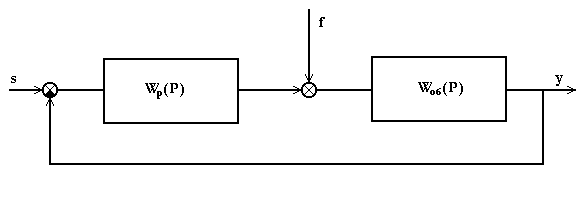
Рисунок 1 – Структурная схема системы регулирования
расчет и построение границы заданного запаса устойчивости для АСР с ПИ-регулятором с передаточной функцией
![]() ,
,
и объектом с передаточной функцией
![]() ,
,
корневым методом (с использованием РАФЧХ);
определение оптимальных параметров настройки регулятора;
расчет, построение и оценку качества переходного процесса в замкнутой АСР по каналу задающего воздействия (S-Y).
Критерий оптимальной
настройки
![]() .
.
РАСЧЕТ ОПТИМАЛЬНЫХ ПАРАМЕТРОВ НАСТРОЙКИ
Автоматическая система, которая обеспечивает наилучшие показатели качества при заданных реальных условиях работы и ограничениях, называется оптимальной. Возможны два способа получения оптимальной системы. В первом, известна структура системы и надо найти оптимальные значения ее числовых параметров, при которых обеспечивается заданный критерий оптимальности. Во втором, система считается полностью неизвестной и требуется определить ее структуру и параметры так, чтобы она была оптимальной по принятому критерию качества (синтез системы).
Можно сформулировать следующие требования, которым должен удовлетворять оптимальный процесс регулирования [2,c.222]:
- затухание переходного процесса должно быть интенсивным;
- максимальное отклонение регулируемой величины должно быть наименьшим;
- продолжительность переходного процесса должна быть минимальной.
Таким образом, задача настройки состоит в том, чтобы в заданной системе регулирования выбрать и установить настроечные параметры регулятора, обеспечивающие оптимальный (или близкий к оптимальному) процесс регулирования.
1.1 Расчет и построение границы заданного запаса устойчивости АСР
Используемый корневой метод параметрического синтеза систем автоматического управления основан на понятии расширенных амплитудно-фазо-частотных характеристик (РАФЧХ). РАФЧХ какого либо звена можно получить подстановкой в передаточную функцию этого звена W(p) оператора р = -m+i или р = -+i. В первом случае расчетные формулы метода обеспечивают получение границы заданной степени колебательности системы m, а во втором – получение границы заданной степени устойчивости в пространстве параметров настройки регулятора. Дальнейший поиск параметров настройки регулятора осуществляется вдоль границы заданного запаса устойчивости системы регулирования до достижения экстремума принятого критерия качества.
Расчетные формулы корневого метода для ПИ – регулятора имеют вид [1,c.53]:
 (1.4)
(1.4)
Здесь Reоб(m,) – расширенная вещественная частотная характеристика объекта;
Imоб(m,) – расширенная мнимая частотная характеристика объекта;
Aоб(m,) - расширенная амплитудно–частотная характеристика объекта:
![]() (1.5)
(1.5)
m – заданная величина степени колебательности;
- частота.
Порядок применения расчетных формул следующий:
задаются величиной m, диапазоном и шагом изменений частоты ;
по передаточной функции объекта рассчитываются значения расширенной частотной характеристики объекта и в явном виде определяются настройки регулятора в заданном диапазоне частот;
для ПИ – регулятора расчетные формулы дают в пространстве параметров настройки границу заданного запаса устойчивости;
на границе заданного запаса устойчивости ищут значения параметров, минимизирующих принятый критерий качества работы системы.
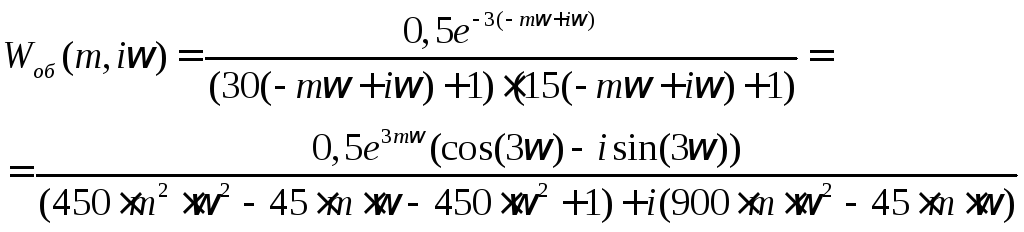
Определим РАФЧХ объекта:
Пусть
![]() а
а![]()
Тогда
![]()
![]()

Для ПИ – регулятора используем расчетную систему уравнений (1.4). По таблице соответствия оценок запаса устойчивости [1,c.54] для =0,85 определяем степень колебательности m=0,302, задаемся начальной частотой =0 и шагом по частоте =0,001. Расчет необходимых величин производим с помощью программы Mathcad. Результаты расчетов сводим в таблицу 1.1 и по данным таблицы строим график зависимости Кр/Ти от Кр (рисунок 1.1).
Таблица 1.1 – Результаты расчета настройки ПИ – регулятора
|
, рад/с |
Reоб(m,) |
Imоб(m,) |
Kp |
Kp/Tи |
|
0 |
0.5 |
0 |
-2 |
0 |
|
5*10-3 |
0.514 |
-0.13 |
-1.69 |
2.52*10-3 |
|
0.01 |
0.477 |
-0.264 |
-1.34 |
9.674*10-3 |
|
0.015 |
0.393 |
-0.375 |
-0.952 |
0.021 |
|
0.02 |
0.278 |
-0.444 |
-0.528 |
0.035 |
|
0.025 |
0.158 |
-0.467 |
-0.073 |
0.052 |
|
0.03 |
0.05 |
-0.453 |
0.413 |
0.071 |
|
0.035 |
-0.036 |
-0.414 |
0.927 |
0.092 |
|
0.04 |
-0.098 |
-0.363 |
1.465 |
0.112 |
|
0.045 |
-0.139 |
-0.308 |
2.025 |
0.132 |
|
0.05 |
-0.164 |
-0.256 |
2.605 |
0.151 |
|
0.055 |
-0.176 |
-0.209 |
3.203 |
0.168 |
|
0.06 |
-0.18 |
-0.167 |
3.815 |
0.181 |
|
0.065 |
-0.177 |
-0.132 |
4.439 |
0.191 |
|
0.07 |
-0.171 |
-0.102 |
5.073 |
0.197 |
|
0.075 |
-0.163 |
-0.078 |
5.714 |
0.196 |
|
0.08 |
-0.153 |
-0.058 |
6.514 |
0.186 |
|
0.085 |
-0.143 |
-0.042 |
7.007 |
0.175 |
|
0.09 |
-0.133 |
-0.029 |
7.654 |
0.152 |
|
0.095 |
-0.123 |
-0.018 |
8.299 |
0.12 |
|
0.1 |
-0.114 |
-9.243*10-3 |
8.938 |
0.077 |

Рисунок 1.1- Граница заданного запаса устойчивости системы регулирования
1.2 Обоснование и выбор оптимальных параметров настройки регулятора
Остается задача выбора на этой линии заданного запаса устойчивости конкретных значений параметров регулятора, обеспечивающих оптимальный (или близкий к оптимальному) процесс регулирования.
Для приближенной оценки качества процесса регулирования могут быть использованы прямые или косвенные методы.
Прямой метод определения качества процесса предполагает решение дифференциального уравнения системы регулирования и построение графика переходного процесса при известном входном возмущающем воздействии.
Косвенные методы исследования качества процесса регулирования значительно проще. Наиболее распространенными косвенными методами оценки качества являются так называемые интегральные критерии качества [3,c.173].
Метод интегральных оценок позволяет получить в результате вычисления определенных интегралов от некоторых функций управляемой переменной суммарную ошибку за все время процесса управления. Интегральная оценка характеризуется подынтегральной функцией, которая выбирается с таким расчетом, чтобы оценка лучше характеризовала качество переходного процесса и выражалась как можно проще через коэффициенты уравнений исследуемой автоматической системы.
Интегральные оценки одновременно характеризуют две важные стороны процесса: быстроту затухания и размер отклонений управляемой переменной в переходном процессе.
В том случае, когда начальные значения и параметры системы удовлетворяют условию монотонного процесса, может быть использована линейная интегральная оценка типа:
![]() (1.6)
(1.6)
Чем меньше величина I1, тем лучше качество процесса управления. Минимуму данного интегрального критерия соответствует максимум отношения Кр/Ти на границе заданного запаса устойчивости [1,c.53].
Однако в случае колебательного или апериодического процесса площади на графике имеют разные знаки и величина интегральной оценки I1 не соответствует действительному качеству переходного процесса. В этом случае целесообразно применить интегральную оценку I, вычисляемую по абсолютным значениям ошибки x, используя интеграл:
![]() (1.7)
(1.7)
Для апериодических и колебательных переходных процессов целесообразно применять квадратичную интегральную оценку типа:
![]() , (1.8)
, (1.8)
представляющую площадь, ограниченную кривой х2(t) и осью абсцисс. Минимуму данной интегральной оценки соответствует точка 0,95max(Кр/Ти) на линии заданного запаса устойчивости в сторону большего значения частоты (“правее максимума”) [1,c.53].
Согласно заданию оптимальные параметры настройки выбираются по второму интегральному критерию I2 (рисунок 1.3).
Кр/Ти=0,186 (1/с);
Кр=6,5;
Ти = Кр/(Кр/Ти) = 6,514 / 0,186= 34,946 с.
Далее для соответствующего Кр определим резонансную частоту замкнутой системы, т.е. рез = 0,08 рад/с (таблица 1.2).
2. Расчет и построение переходного процесса в аср
2.1 Переходный процесс в замкнутой аср по каналу задающего воздействия.
Для получения переходного процесса определим ВЧХ системы:
 (2.1.1)
(2.1.1)
где
![]() ,a
,a
![]()
 (2.1.2)
(2.1.2)
Заменяем в W(p) оператор р на i и проводим необходимые преобразования:
 Для
упрощения расчета введем некоторые
коэффициенты:
Для
упрощения расчета введем некоторые
коэффициенты:
А1=
![]() ,
(2.1.3)
,
(2.1.3)
А2=
![]() ,(2.1.4)
,(2.1.4)
А3=
![]() ,(2.1.5)
,(2.1.5)
А4=
![]() ,(2.1.6)
,(2.1.6)
Тогда получим
![]() (2.1.7)
(2.1.7)
Домножим числитель и знаменатель на число комплексно сопряженное знаменателю и проведем необходимые преобразования:
![]() (2.1.8)
(2.1.8)
Отсюда ВЧХ системы
![]() (2.1.9)
(2.1.9)
Зададимся начальной частотой =0 и шагом по частоте =0,001. Расчет производим с помощью программы Matcad. Результаты расчета сводим в таблицу 2.1.1 и по данным таблицы строим график зависимости Re() от (рисунок 2.1.1)
Таблица 2.1.1 – Результаты расчета ВЧХ
|
w,рад/с |
Re() |
|
0 |
1 |
|
0,01 |
1.0028989 |
|
0,02 |
1.014716 |
|
0,03 |
1.0373697 |
|
0,04 |
1.0633552 |
|
0,05 |
1.0657313 |
|
0,06 |
0.9688699 |
|
0,07 |
0.6119996 |
|
0,08 |
-0.0894777 |
|
0,09 |
-0.7185611 |
|
0,1 |
-0.9091239 |
|
0,11 |
-0.8412869 |
|
0,12 |
-0.7121479 |
|
0,13 |
-0.5907668 |
|
0,14 |
-0.4909418 |
|
0,15 |
-0.4114335 |
|
0,16 |
-0.348216 |
|
0,17 |
-0.2975278 |
|
0,18 |
-0.2564147 |
|
0,19 |
-0.2226651 |
|
0,2 |
-0.19464 |
|
0,21 |
-0.1711202 |
|
0,22 |
-0.1511898 |
|
0,23 |
-0.1341528 |
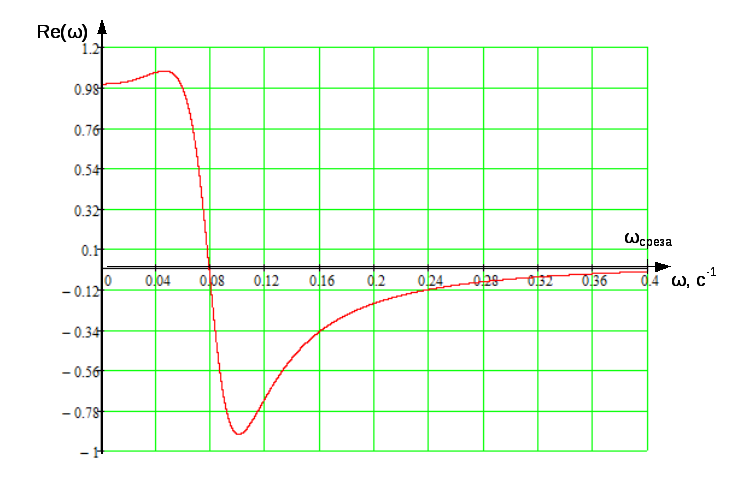
Рисунок 2.1.1 - ВЧХ объекта
Переходный процесс по каналу задающего воздействия рассчитываем по формуле:
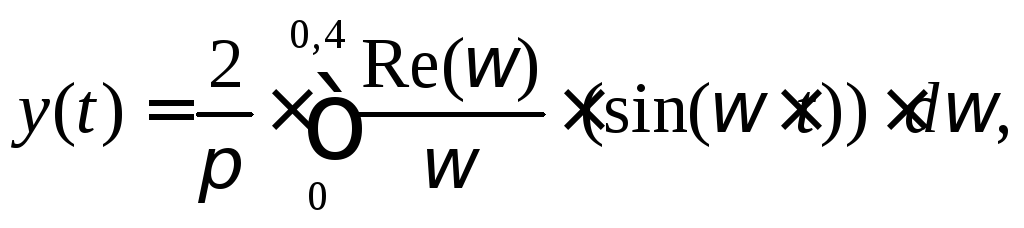 (2.1.10)
(2.1.10)
где 0,4 частота среза определяемая из графика ВЧХ изображенного на рисунке 2.1.1
Результаты расчета представим в виде таблицы 2.1.2.
Таблица 2.1.2 – Результаты расчета переходного процесса системы по каналу задающего воздействия
|
Время t, c |
Ордината y(t) |
|
0 |
0 |
|
10 |
0.107 |
|
20 |
0.262 |
|
30 |
0.422 |
|
40 |
0.566 |
|
50 |
0.682 |
|
60 |
0.773 |
|
70 |
0.84 |
|
80 |
0.888 |
|
90 |
0.922 |
|
100 |
0.945 |
|
110 |
0.961 |
|
120 |
0.972 |
|
130 |
0.979 |
|
140 |
0.984 |
|
150 |
0.988 |
|
160 |
0.991 |
|
170 |
0.993 |
|
180 |
0.994 |
|
190 |
0.995 |
|
200 |
0.996 |
Пользуясь данными таблицы 2.1.2 изобразим графически транспортное запаздывание, то есть покажем начальный участок переходного процесса на рисунке 2.1.2.

Рисунок
2.1.2 – транспортное запаздывание
![]()
На рисунке 2.1.3 изобразим весь переходный процесс системы по каналу задания построенный поданным таблицы 2.1.2.
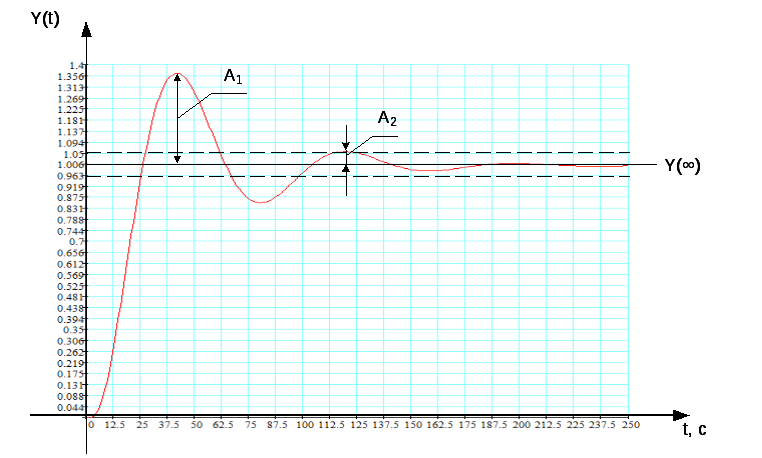
Рисунок 2.1.3 – переходный процесс замкнутой системы по каналу задания