

Моделирование внутреннего контура на со

fт

 Iя
Iя
U TO

Расчет внешнего контура на мо
Внешний контур:
-
![]()
![]()
![]()




![]()







![]()

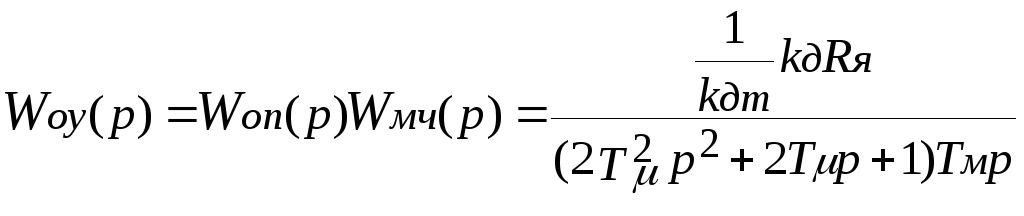
Объектом управления для внешнего контура является весь оптимизированный на МО внутренний контур плюс механическая часть.
Рассмотрим П-регулятор для внешнего контура, т.е.:
![]()
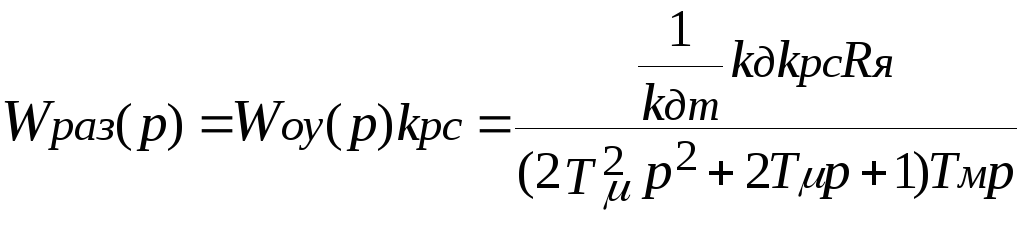
Тогда передаточная функция разомкнутой САР для внешнего контура будет следующей:
Передаточная функция для замкнутой САР будет иметь вид:

Фильтр Баттерворта
3-го порядка в зависимости от малой
некомпенсируемой постоянной времени
![]() следующий:
следующий:

Приравнивая коэффициенты при соответствующих степенях p получим следующие равенства:
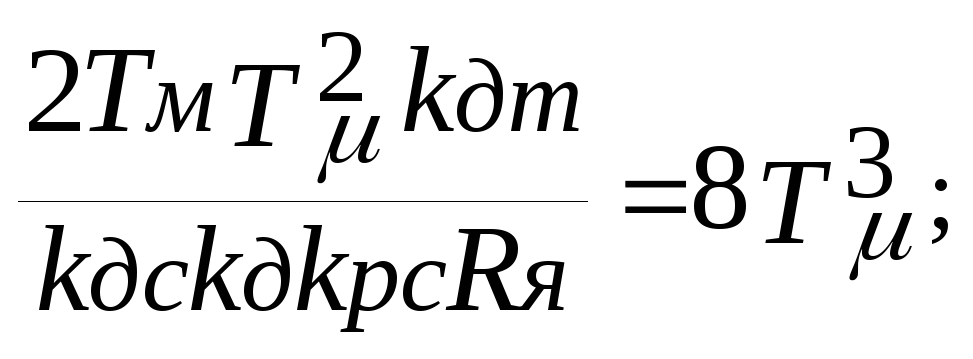
Все равенства одинаковы и из любого получается:
![]()
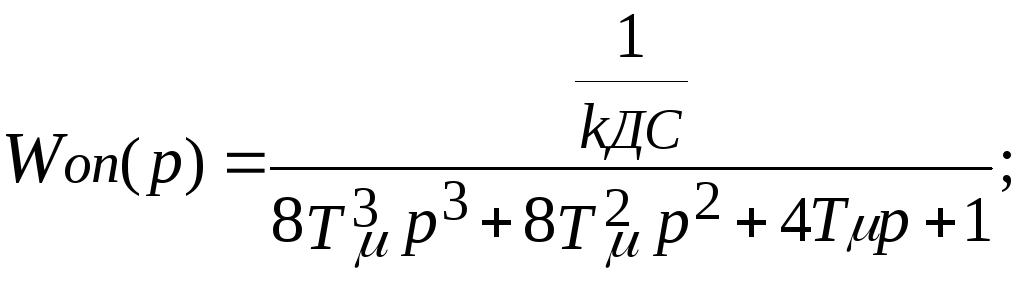
Соответственно передаточная функция оптимизированного на МО внешнего контура следующая:
![]()
Передаточная функция по нагрузке Мс получается не астатической, а статической :

![]()
В статике при р=0 получаем :
![]()
Т.е. существует статическая связь между нагрузкой Мс и выходной величиной ω- чем больше нагрузка Мс, тем больше и статическая ошибка по выходной величине ω.
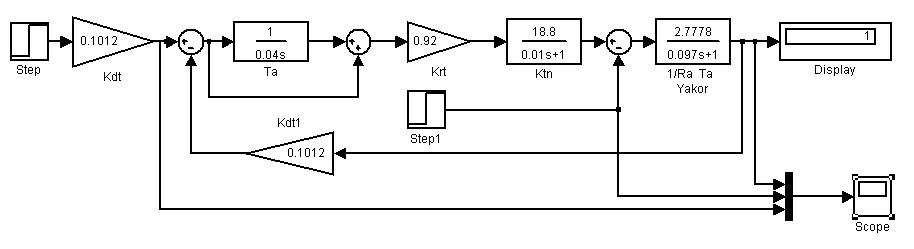
Моделирование внешнего контура на мо


 fT
fT
 Iя
Iя
U TO

Расчет внешнего контура на со
Внешний контур:
![]()
![]()
![]()



![]()







![]()


-
Как и при настройке внешнего контура на МО, объектом управления для внешнего контура на СО является весь оптимизированный на МО внутренний контур плюс механическая часть.
Рассмотрим ПИ-регулятор:
![]()
Тогда передаточная функция разомкнутой САР для внешнего контура будет иметь вид:

Передаточная функция для замкнутой САР будет следующей:
 В
результате получили передаточную
функцию 4-го порядка, т.к. p4
, следовательно, нужно сравнивать
коэффициенты при степенях p
с соответствующими коэффициентами при
степенях p
фильтра Баттерворта 4-го порядка,
передаточная функция которого имеет
вид:
В
результате получили передаточную
функцию 4-го порядка, т.к. p4
, следовательно, нужно сравнивать
коэффициенты при степенях p
с соответствующими коэффициентами при
степенях p
фильтра Баттерворта 4-го порядка,
передаточная функция которого имеет
вид:

Приравнивая коэффициенты при соответствующих степенях p получим следующие равенства:

![]()
Из 4-го равенства
найдем
![]() :
:
![]()
Очевидно, что первые три равенства равны и из любого находим kрс:
![]()
Соответственно передаточная функция оптимизированного на СО внешнего контура следующая:
 ,
,
 ,
,
которая отличается от соответствующей передаточной функции фильтра Баттерворта наличием в числителе форсирующего звена. Для устранения такого перерегулирования задающий сигнал подают на вход регулятора внешнего контура не непосредственно, а через сглаживающий фильтр в виде апериодического звена 1-го порядка с передаточной функцией:
![]()
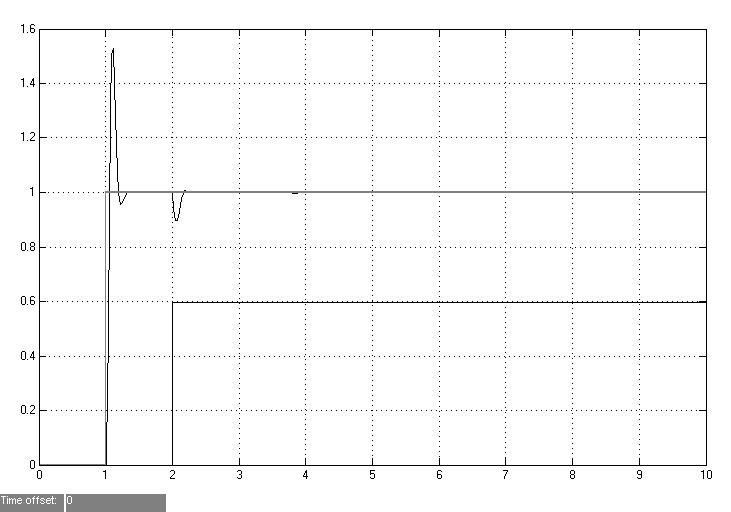
Моделирование внешнего контура на со

Расчет узла токоограничения
Ток якоря определяется величиной управляющего сигнала, поступающего на регулятор тока. При UДТ< Uто рассогласование на входе регулятора тока положительное (EРТ = Uто - UДТ), регулятор тока увеличивает свой выходной сигнал, соответственно увеличивается напряжение тиристорного преобразователя и расчет тока IЯ ( и обороты двигателя ). И наоборот при UДТ> Uто напряжение тиристорного преобразователя уменьшается, соответственно уменьшается и ток IЯ (обороты двигателя снижаются). Отсюда следует, что для ограничения тока по максимальной величине (соответственно и ограничение вращающего момента двигателя) должно производится при следующем условии UДТ = Uто при IЯ = IЯ MAX .
В нашем случае UДТ MAX = UСХ = 10 (В). Значит характеристика нелинейного узла токоограничения будет следующая :

Данный нелинейный
узел токоограничения пропускает входной
сигнал UРС
один к одному, а при UРС>
UСХ
UТО
ограничивается
значением
![]() UСХ.
Если при
большой нагрузке или при пуске ДПТ ток
якоря IЯ
хоть немного
превысит значение IЯ
MAX
, то при UДТ
станет
большим UСХ
на входе
регулятора тока будет отрицательный
сигнал, тиристорный преобразователь
будет снижать UЯ
и IЯ
будет
уменьшатся до IЯ
MAX
. При
равенстве IЯ
= IЯ
MAX
вход регулятора тока будет равен 0, а
его выход не меняется.
Если вал
двигателя заклинит, то в идеальном
случае срабатывания токоограничителя,
двигатель остановится без механической
поломки. При этом к якорной цепи будет
приложено небольшое напряжение и у
заторможенного двигателя по якорной
цепи будет пробегать ток IЯ
равный IЯ
MAX.
Это вполне вероятно, т.к. внутренний
контур настроен на МО и лучшим образом
отрабатывает управляющий сигнал Uто
поступающий на внутренний контур тока.
UСХ.
Если при
большой нагрузке или при пуске ДПТ ток
якоря IЯ
хоть немного
превысит значение IЯ
MAX
, то при UДТ
станет
большим UСХ
на входе
регулятора тока будет отрицательный
сигнал, тиристорный преобразователь
будет снижать UЯ
и IЯ
будет
уменьшатся до IЯ
MAX
. При
равенстве IЯ
= IЯ
MAX
вход регулятора тока будет равен 0, а
его выход не меняется.
Если вал
двигателя заклинит, то в идеальном
случае срабатывания токоограничителя,
двигатель остановится без механической
поломки. При этом к якорной цепи будет
приложено небольшое напряжение и у
заторможенного двигателя по якорной
цепи будет пробегать ток IЯ
равный IЯ
MAX.
Это вполне вероятно, т.к. внутренний
контур настроен на МО и лучшим образом
отрабатывает управляющий сигнал Uто
поступающий на внутренний контур тока.