

курсовая работа / Автоматическая система дозирования
.docx


1 ИССЛЕДОВАНИЕ ЛИНЕЙНОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
1.1 Описание принципиальной схемы системы автоматического управления
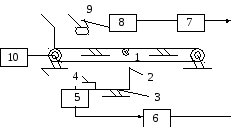
1 – встроенная роликоопора; 2 – рычаг; 3 – опора; 4 – флажок; 5 - преобразующий элемент; 6 – трехпозиционное устройство; 7 – импульсный элемент; 8 – привод заслонки; 9 – регулирующая заслонка; 10 – привод конвейера.
Рис. 1 Принципиальная функциональная схема дозатора
Автоматическая система дозирования работает следующим образом. Материал проходит над секцией взвешивания грузоприемного устройства, чувствительный элемент (ролик) 1 воспринимает значение нагрузки материала на ленте конвейера, значение нагрузки преобразуется в электрический сигнал постоянного тока с помощью трехпозиционного устройства 6. Индикатором колебаний служит флажок 4, перемещение которого преобразуется в три команды: «Больше нормы», «Норма» и «Меньше нормы». Сигнал с трехпозиционного устройства , усиленный с помощью усилителя, управляет исполнительным механизмом привода заслонки- реверсивным электродвигателем 8, опускающим или поднимающим заслонку 9, компенсируя тем самым отклонение нагрузки от заданного значения.
1.2 Построение функциональной схемы автоматической системы дозирования
На основе имеющейся принципиальной схемы построим функциональную схему двухагрегатного дозатора непрерывного действия.
Функциональная схема – это схема, состоящая из функциональных элементов, которые показывают их функциональное назначение при автоматическом управлении технологическим процессом и связь между ними.
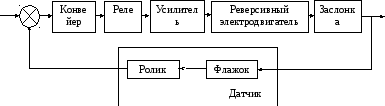
Рисунок 2 – Функциональная схема устройства
1.3 Построение структурной схемы
По анализу функциональной схемы составим структурную схему автоматической системы дозирования:

W1(p) – передаточная функция конвейера; W2(p) – передаточная функция реле; W3(p) – передаточная функция усилителя; W4(p) – передаточная функция реверсивного электродвигателя; W5(p) – передаточная функция заслонки; W6(p) – передаточная функция датчика.
Рисунок 3 – Структурная схема двухагрегатного дозатора
Структурная схема системы автоматического управления отражает прохождение и преобразование сигналов в звеньях системы управления.
Зададим передаточные функции элементов:


1.4 Преобразование структурной схемы дозатора

Найдем общую передаточную функцию:




1.4 Определение устойчивости системы по критерию Михайлова.
Система автоматического управления будет устойчивой если при изменении w от 0 до + годограф Михайлова начав движение из положительной вещественной полуоси комплексной плоскости вращаясь против часовой стрелки и нигде не обращаясь в 0, обходит последовательно n- квадрантов комплексной плоскости, где n- степень характеристического уравнения.
Характеристическое уравнение имеет вид:
L(p)=0.396p7+0.517p6+1.43p5+1.501p4+1.192p3+p2-1.9308p+3.78=0
L(iω)=0.396(iω)7+0.517(iω)6+1.43(iω)5+1.501(iω)4+1.192(iω)3+(iω)2-1.9308(iω)+3.78=0
L(iω)=(3.78-ω2+1.501 ω4+0.517 ω6)+ iω(-1.9308-1.192 ω2+1.43 ω4+0.396 ω6)=0
1.5 Определение устойчивости системы по критерию Гурвица.
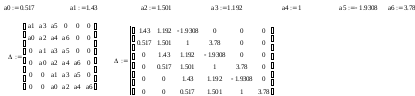
Критерий Гурвица формирует условие устойчивости в виде определителя. Сводится к тому, чтобы при a0>0 все диагональные миноры главного определителя были положительны. По коэффициентам характеристического уравнения составляется определитель Гурвица. Для этого по главной диагонали определителя выписываются все коэффициенты характеристического уравнения, начиная со второго, затем вверх записываются коэффициенты с возрастающим индексом, а вниз с убывающим индексом. Места, которые должны быть заняты коэффициентами с индексами выше an и ниже a0 заполняются нулями. В результате получают определитель из n- строк и m- столбцов. Его первая строка состоит из нечетных коэффициентов, начиная с a1. Составленный определитель называется главным определителем Гурвица, он имеет порядок совпадающий с порядком характеристического уравнения. Из главного определителя составляются частные определители первого, второго, третьего и т.д. порядков их образования из главного определителя.
Критерий Гурвица используется для определения устойчивости систем, степень характеристического уравнения которых не выше 6. Так как степень характеристического уравнения исследуемой системы n=7, следовательно для составления определителя Гурвица берем часть характеристического уравнения, начиная с N=6.
0.517p6+1.43p5+1.501p4+1.192p3+p2-1.9308p+3.78

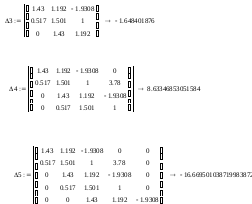
Вывод: По критерию Гурвица система автоматического управления не устойчива, т.к. ∆3 и ∆5 отрицательны.
1.6 Построение переходного процесса
Переходная функция - это реакция системы
на ступенчатое входное воздействие.
Для того, чтобы построить переходный
процесс, используем обратное преобразование
Лапласа от функции вида

h(t)=



Анализируя график можно сделать вывод, что система не устойчива, так как переходный процесс расходящийся. Прямые оценки качества системы определить невозможно.
1.7 Построение АЧХ
АЧХ строится для того, чтобы определить косвенные оценки качества системы.

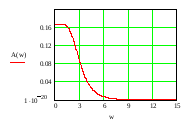
Определим косвенные оценки качества системы:
- Амплитуда при нулевой частоте A(0)= 0.162;
- Максимальная амплитуда Аmax= 0.162 ;
- Резонансная частота - это частота, при которой амплитуда максимальна
wp=0 Гц;
- Полоса пропускания – это диапазон
частот от w1 до w2,
который определяется при срезе величиной
 0.115 графика АЧХ
0.115 графика АЧХ
w1= 0 Гц, w2=2.85 Гц.
-
Показатель колебательности

- Величина перерегулирования

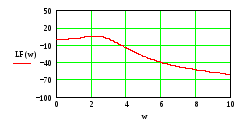
1.8 Определение запаса устойчивости по ЛАЧХ и ЛФЧХ

По данной передаточной функции построим ЛАЧХ и ЛФЧХ:


|
|
|
|
|
|
УИТС.421413.102 ПЗ |
Лист |
|
|
|
|
|
|
|
|
|
Изм. |
Лист |
№ докум. |
Подп. |
Дата. |