

Задание
Rя = 0,36 Ом
Lя = 0,040 Гн
Uян = 188 В
Iян = 46 А
nн = 970 об/мин
J = 0,35 кг.м2
Iямах = к . Iян = 2,2 . 46 = 101.2 А
Tµ =0,01 c
Расчет двигателя постоянного тока как объекта управления
Расчетные схемы двигателя постоянного тока с независимым возбуждением (ДПТ НВ) следующие:
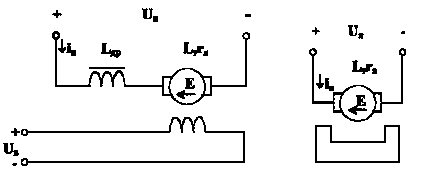
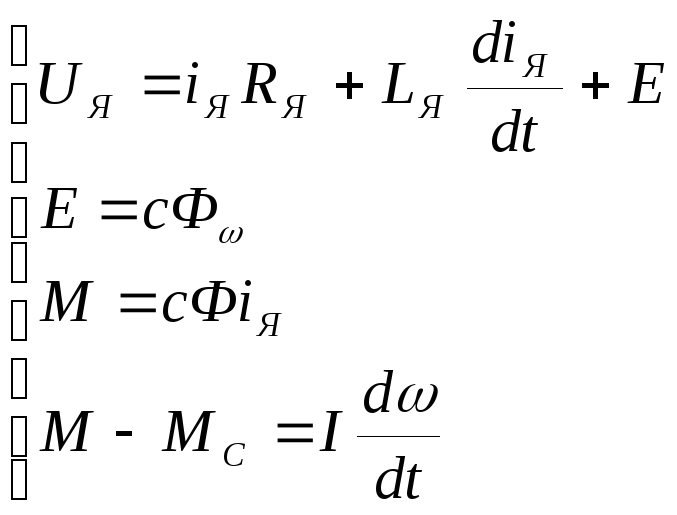
Работа ДПТ НВ описывается следующей системой уравнений:
![]()
 (1)
(1)
где:
![]() -
сопротивление всей якорной цепи;
-
сопротивление всей якорной цепи;
Lя = L + Lдр + Lдп -индуктивность якорной цепи;
Ф - магнитный поток возбуждения;
ω - угловая частота вращения вала ДПТ;
М - вращающий момент, развиваемый ДПТ;
Мс - момент сопротивления от рабочего механизма;
I - момент инерции вращающихся частей (якоря ДПТ и рабочего механизма);
Е- противо ЭДС якоря;
С- электромашинный коэффициент ДПТ.
При расчетах электромеханических параметров ДПТ значение с и Ф отдельно не используются и в паспортных данных их не приводят. Произведение сФ определяется по паспортным данным двигателя для номинального режима в установившемся режиме.
![]()
при условии
![]() ;
;
![]()
обозначим сФ = к
![]() (В с)
(В с)
Из двух первых уравнений системы (1) получаем:
![]()
![]()
(2)
Уравнение (2) - дифференциальное уравнение 1-го порядка для якорной цепи:
входной сигнал- напряжение Uя, выходной сигнал- ток якоря iЯ .В операторной форме записи получим следующее:
![]()
![]()
 (3)
(3)
Величина
![]() имеет размерность времени [c]
и называется электромеханической
постоянной времени якорной цепи.
имеет размерность времени [c]
и называется электромеханической
постоянной времени якорной цепи.
![]() (с)
(с)
Используя приращение
![]() которое называет приращение
которое называет приращение![]() приE=const
получаем из (3):
приE=const
получаем из (3):
![]() -дифференциальное
уравнение в операторной форме.
-дифференциальное
уравнение в операторной форме.
Получаем передаточную функцию якорной цепи:
![]() -
представляет собой аппереодическое
звено 1-го порядка.
-
представляет собой аппереодическое
звено 1-го порядка.
Теперь исходную систему (1) можно свести в следующую систему:
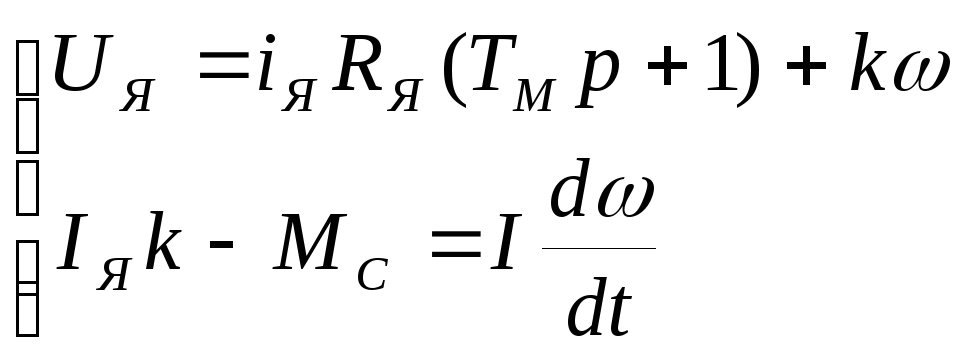 (5)
(5)
В этой
системе уравнений (5) входом ДПТ является
напряжение Uя
, выходом -частота
вращения![]() ,
нагрузка-
Мс,
а ток iя
является промежуточной величиной. Решим
систему уравнений (5) относительно
,
нагрузка-
Мс,
а ток iя
является промежуточной величиной. Решим
систему уравнений (5) относительно
![]() в зависимости от величин Uя
и Мс.
Из 2-го уравнения системы (5) находим:
в зависимости от величин Uя
и Мс.
Из 2-го уравнения системы (5) находим:
![]() ;
;
![]()
Подставим значение
![]() в 1-е уравнение системы (5) получим:
в 1-е уравнение системы (5) получим:
 ;
;
![]() ;
;
![]()
 Первое слагаемое
определяет влияние на
Первое слагаемое
определяет влияние на
![]() напряжение якоря
напряжение якоря![]() ,
а второе - влияние момента нагрузкиMc.
Величина
,
а второе - влияние момента нагрузкиMc.
Величина
![]() имеет размерность времени [c]
и называется электромеханической
постоянной времени.
имеет размерность времени [c]
и называется электромеханической
постоянной времени.
![]() (С)
(С)
Величина кд = 1/к – коэффициент передачи двигателя. Вычисляем:
![]()
Окончательно получим выражение для передаточной функции ДПТ:

Следует отметить, что в статическом режиме (при р=0) формула (6) совпадает с известной формулой механической характеристики ДПТ:
![]() (7)
(7)







 U1<Uян;
U2<U1
U1<Uян;
U2<U1








 1 2
1 2
Uян 1
 2
2
U1
U2t
M
Анализ передаточной функции ДПТ по выражению (6) показывает , что его структурная схема может быть представлена последовательным соединением апериодического звена 1-го порядка и интегрирующего звена, охваченные отрицательной обратной связью.

Условным
здесь является сравнение тока якоря
![]() с током нагрузки. Получимпередаточную
функцию по данной схеме:
с током нагрузки. Получимпередаточную
функцию по данной схеме:


что полностью совпадает с передаточной функцией по формуле (6). Поэтому приведенная структурная схема является адекватной и полностью соответствует дифференциальному уравнению ДПТ.
Передаточная функция ДПТ является звеном 2-го порядка. Определим степень колебательности:
![]()
Т.к. 0 < ![]() < 1 ,то данное
звено 2-го порядка является колебательным.
< 1 ,то данное
звено 2-го порядка является колебательным.