Расчет внутреннего контура на мо
Неизменяемая часть:
![]()
![]()





![]()
Такая неизменяемая часть характерна для многих объектов управления, в данном случае для якорной цепи ДПТ.
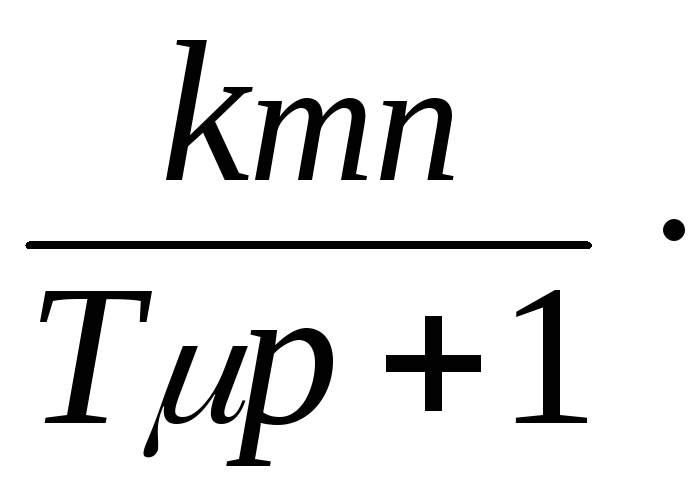
![]() - тиристорный преобразователь;
- тиристорный преобразователь;
![]() - якорная цепь,
причем
- якорная цепь,
причем
![]() <<
<<![]() ;
;
![]() - датчик тока.
- датчик тока.
![]()
![]()


![]()







![]()
Передаточная функция неизменяемой части как объекта управления:
![]() =
=
![]()
Выбираем ПИ-регулятор, т.к. статическая ошибка должна быть исключена. Передаточная функция ПИ-регулятора будет следующей:
![]()
Соответственно передаточная функция разомкнутой САР (разрыв после датчика тока) будет следующей:
![]()
Для уменьшения порядка расчета следует принять Tрт=Tя. Это тем более обосновано, что регулятор Wрт(p) должен компенсировать инерционное действие большей постоянной времени Тя.
В этом случае после сокращения (1+Тртр) и (1+Тяр) получаем:
![]()
Задача синтеза теперь состоит в определении коэффициента kpт, обеспечивающий оптимальный переходной процесс по задающему сигналу Uз, т.е. настройку на МО (модульный оптимум).
Для этого рассмотрим передаточную функцию замкнутой САР:
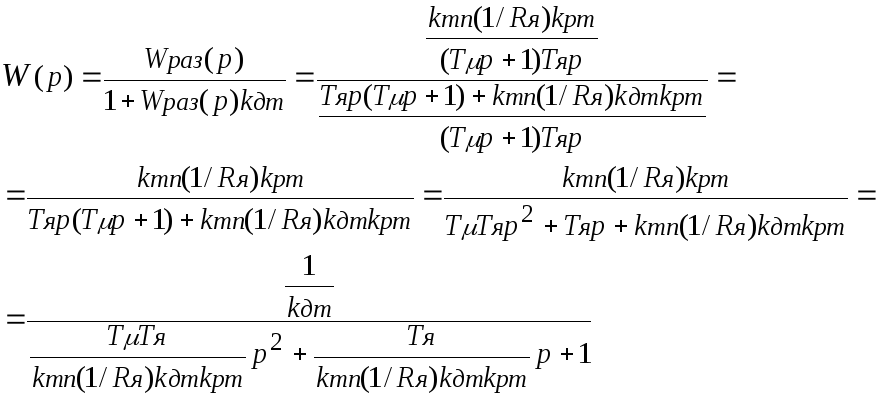
В результате получили передаточную функцию 2-го порядка, поэтому нужно сравнивать коэффициенты при степенях p с соответствующими коэффициентами при степенях p фильтра Баттерворта 2-го порядка.
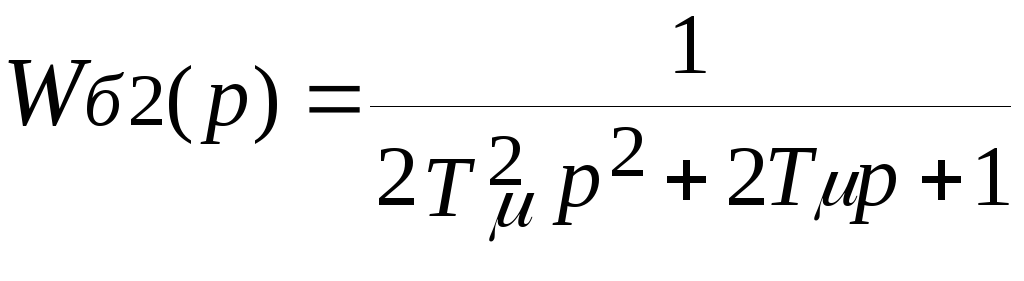
Фильтр Баттерворта
2-го порядка по постоянной времени
![]() будет
следующим:
будет
следующим:
Приравнивая коэффициенты в соответствующих степенях р фильтра Баттерворта и полученной нами передаточной функции замкнутой САР получим следующие равенства:

![]()
![]()
Очевидно, что оба уравнения одинаковы. Из любого уравнения находим kp:
![]()
Определим теперь передаточную функцию оптимизированной САР:
 Если система 2-го
порядка, коэффициент демпфирования в
полученной передаточной функции:
Если система 2-го
порядка, коэффициент демпфирования в
полученной передаточной функции:
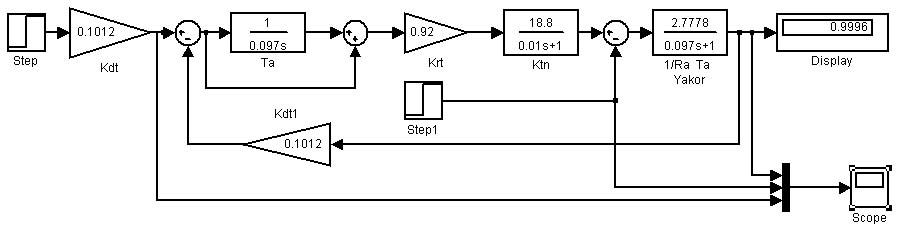
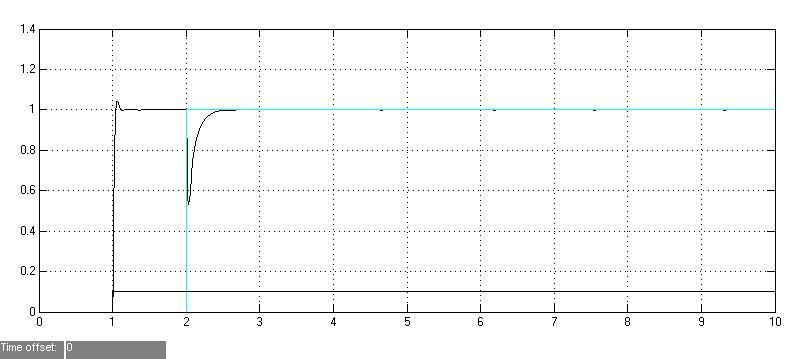
Моделирование внутреннего контура на мо
fт


Iя
U TO

Расчет внутреннего контура на со
Внутренний контур:
![]()
![]()
![]()



![]()





-
Определим передаточную функцию внутреннего контура, не принимая условие Tрт=Tя.
Передаточная функция ПИ-регулятора:
![]()
Передаточная функция разомкнутого внутреннего контура:
![]()
Передаточная функция замкнутого внутреннего контура:
 В
результате получили передаточную
функцию 3-го порядка, т.к. p3
(вместо 2-го порядка при настройке на
МО), следовательно, нужно сравнивать
коэффициенты при степенях p
с соответствующими коэффициентами при
степенях p
фильтра Баттерворса 3-го порядка,
передаточная функция которого имеет
вид:
В
результате получили передаточную
функцию 3-го порядка, т.к. p3
(вместо 2-го порядка при настройке на
МО), следовательно, нужно сравнивать
коэффициенты при степенях p
с соответствующими коэффициентами при
степенях p
фильтра Баттерворса 3-го порядка,
передаточная функция которого имеет
вид:

Приравнивая коэффициенты при соответствующих степенях p можно получить следующие три равенства:
 ;
;

Видно, что в равенствах появляется неоднозначность, связанная с наличием суммы во втором равенстве и сумма обратной величины коэффициентов в третьем равенстве, поэтому возможны следующие варианты расчета:
Вариант А:


Разделив 1-е равенство на 2-е, получим:

Отсюда найдем kрт:

![]() подставив значениеkрт
в 1-е
уравнение,
подставив значениеkрт
в 1-е
уравнение,
![]() найдемТрт
найдемТрт
Вариант Б:



Выполняем ту же последовательность вычислений, что и при варианте А. В результате получим:
![]()

И
 з
полученных выражений видно, что с
погрешностью, обусловленной малой
постоянной времени
з
полученных выражений видно, что с
погрешностью, обусловленной малой
постоянной времени![]() ,
можно принять:
,
можно принять:
![]()
![]()
![]()
![]()
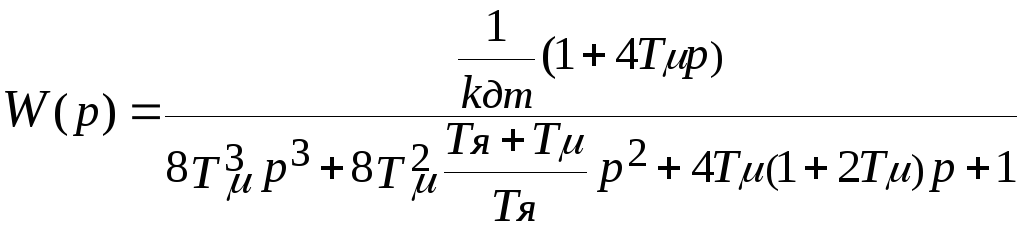
Соответственно передаточная функция замкнутого внутреннего контура получается близкой к фильтру Баттерворта 3-го порядка с форсирующим звеном (1+4Тp) в числителе: