

Замкнутая разработанная сар.
Переходной процесс выходной координаты при максимально возможном изменении управляющего воздействия для замкнутой САР (отклонение выходной координаты в пределах ± 5°С):
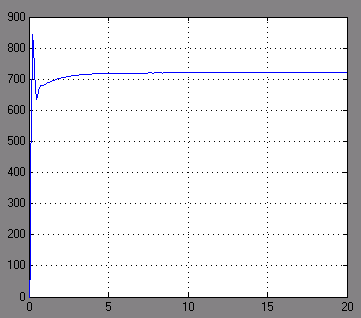

Рис.13. Переходной процесс замкнутой САР без возмущения
Переходный процесс выходной координаты при максимальном скачке возмущения (отклонение выходной координаты в пределах ± 5° С):
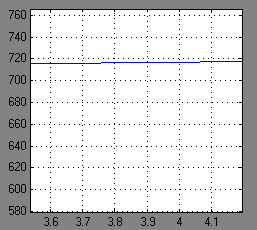
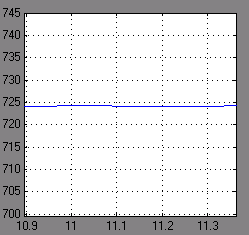



Рис.14. Переходной процесс замкнутой САР c возмущением
По графику переходного процесса можно проследить, что система устойчива. При изменении tп от tmin = 1.3 мм до tп max = 1.7 мм на 5 секунде погрешность обработки составляет ± 5° С ( до возмущения – 720° С , после возмущения – 725 ° С , что и требовалось получить.
Оценка качества САР оценивается по следующим показателям переходной функции:
ууст – величина выходной координаты после окончания переходного процесса;
уmax – максимальная величина выходной координаты в переходном процессе;
Δ – трубка точности (если Δ не задана, то берут в пределах 5 %);
tm – время достижения первого максимума выходной координаты;
tпп – время переходного процесса (время, за которое выходная координата попадет в трубку точности и не выйдет из неё);
tн – время нарастания сигнала;
tз – время запаздывания;
tу – время достижения установившегося режима;
σ % - величина перерегулирования
σ % =((уmax- ууст )/ ууст )*100%,
уmax = 840 °С, ууст = 725 °С;
tm = 0,23 с, tз = 0,15 с,
tпп = 2 с, tн = 0,13 с, tу = 0,18 с;
Δ = (688,75; 761,25)
σ % =((840- 725 )/ 725 )*100% = 15,86 %.
По графикам переходных процессов можно сделать вывод, что спроектированная САР удовлетворяет заданным требованиям по быстродействию и точности.
Заключение
В ходе курсовой работы была спроектирована система автоматического управления температурой в области резания. Система удовлетворяет всем требуемым параметрам. Выбранный и использованный в проектировании метод с использованием ЛЧХ очень удобен благодаря своей простоте, наглядности и точности, что позволило сравнительно легко провести анализ и синтез САР. Мы получили систему, отвечающую всем поставленным требованиям:
при максимальном возмущении, действующим на систему, статическая ошибка
 выходной
координаты составляет 5°
С;
выходной
координаты составляет 5°
С;запасы устойчивости по модулю Δ L = 8,6 дб, по фазе
 50°,
следовательно,
поставленная задача выполнена.
50°,
следовательно,
поставленная задача выполнена.
Список литературы
Бесекерский В.А. «Сборник задач по теории автоматического регулирования и управления» - М.: Наука, 1978г.
Воронов А.А. «Основы теории автоматического регулирования и управления», М., Высшая школа, 1997.
Копылов И. П. Справочник по электрическим машинам, том 1. Москва Энергоатомиздат, 1988.
«Основы автоматизации и управления технологическими процессами в машиностроении». Под общ. Ред. В.Ц. Зориктуева, Н.С.Буткина. – Уфа: Уфимск.гос.техн.ун-т, 2000.