

5. Синтез сау.
Передаточная функция усилителя имеет вид :
Wу(p) =Kу, где
Ку– коэффициент передачи усилителя. Ищем его из условия:
![]() где
где
![]() статическая
ошибка регулирования замкнутой системы.
статическая
ошибка регулирования замкнутой системы.
Принимаем З%=(2/24)*100%=8,3%
![]() статическая
ошибка регулирования разомкнутой
системы.
статическая
ошибка регулирования разомкнутой
системы.
P%=(3,053/24)*100%=12,72%, гдеRz=3,053мкм
Найдем Крс:
Крс=(P% /З)-1=1,53-1=0,53
Кку=Крс/(Кпэ*Кд*Кпу*Кпр*Кду)=0,53/(22*1,087*0,0014*3,67*0,208)=21,8
Введём интегро-дифференциальное КУ. Это КУ позволит увеличить быстродействие системы, сделать её устойчивой:
W(p)=T1/T3*p+1, где Т1=1.5, Т2=0.05.


6.Анализ качества скорректированной сау.
Для анализа качества скорректированной САУ, построили ЛЧХ скорректированной системы. Из графиков видно, что запасы устойчивости составляют:
- по фазе =41
по амплитуде L=9,05дб
что удовлетворяет заданным условиям.
= 0% -перерегулирование;
= 1 – колебательность системы;
Делая вывод о качестве скорректированной САУ можно сказать, что система вполне работоспособна, устойчива (имеет запасы устойчивости по фазе и амплитуде).
7.Анализ качества сар.
Проанализируем переходные процессы в синтезированной САР:
Для разомкнутой САР:
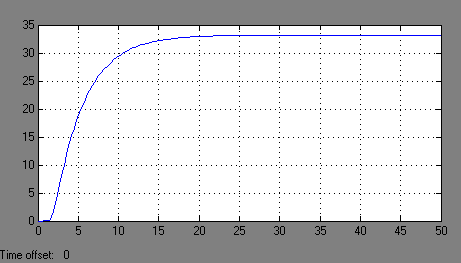
Переходный процесс выходной координаты при максимально возможном изменении управляющего воздействия для разомкнутой САР:

Переходный процесс выходной координаты при максимальном скачке возмущения на 15 секунде:


Для замкнутой САР:
Переходный процесс выходной координаты при максимально возможном изменении управляющего воздействия для замкнутой САР:
4. Переходный процесс выходной координаты при максимальном скачке возмущения на 30 секунде:


Заключение.
В данной работе была спроектирована система автоматического управления шероховатостью в области точения. Выбранный и использованный в проектировании метод с использованием ЛЧХ оказался очень удобным благодаря своей простоте, наглядности и точности, что позволило сравнительно легко провести анализ и синтез САУ. Мы получили систему, отвечающую всем поставленным требованиям, следовательно, поставленная задача выполнена.
Список литературы:
Бесекерский В.А. «Сборник задач по теории автоматического регулирования и управления» - М.: Наука, 1978г.
Топчеев Ю.И. «Атлас для проектирования систем автоматического регулирования» - М.: Машиностроение, 1989г.
«Теория автоматического управления» под ред. Проф. А.В. Нетушила –М.: Высшая школа, 1976г.