

3. Построение структурной схемы сау.
Двигатель.
UВ – напряжение на обмотке возбуждения двигателя;
 UВ
= const.
UВ
= const.
Передаточная функция двигателя имеет вид:
![]() ,
где
,
где
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
LЯ – индуктивность обмотки якоря;
RЯ – активное сопротивление обмотки якоря;
JЯ – ток в обмотке якоря;
ФД – поток возбуждения двигателя;
М – номинальная скорость вращения вала двигателя;
PН – номинальная мощность двигателя;
UН – номинальное напряжение на обмотке двигателя;
С – конструктивная постоянная;
JПР – суммарный момент инерции, приведенный к оси двигателя.
1/Rя=4.55 Тэ=Lя/Rя=0.2091
Сe*Ф=(Uн-Iян*Rя)/ωн Сm*Ф=J*ωн/Iя, где ωн=418.7 рад/с, Uн=220 В, J=0.003*3=0.009, Iян=Pн/(ή*Uя)=18.3
Се*Φ=0.5158 См*Ф=0.0038
Кд=1/с*Ф=1/0,5158=1,9387;
Передаточная функция имеет вид:
Кд 1,087
W
 (p)
= =
(p)
= =
Тя*Тм*p^2 +Тм*p+1 0,211*p^2+1,0093*p+1
Преобразователь электрический.
Передаточная функция ПЭ имеет вид:
Кпэ 22
W
 (p)
= =
, где T1=0,092
c;
T2=0,86
c.
(p)
= =
, где T1=0,092
c;
T2=0,86
c.
(Т1*p+1)(Т2*p+1) (0,092*p+1)(0,86*p+1)
KПЭ найдем из условия: Kпэ=Uд/Uпэ=220/10=22.
Передаточное устройство.
Передаточная функция ПУ имеет вид:
Кпу
W (p)
= 0,00905, где T=0
c.
(p)
= 0,00905, где T=0
c.
Т*p+1
Кпу=S/н=0,6*60/2*3,14*4000=36/25120=0,00905.
Процесс точения.
Процесс точения описывается уравнением:
Rz=26,45*S^0,37*tп^(-0,18); Rz=*(S^0,37)
W(p) = dRz/dS = *0,37*S^(-0,63) = 1375^(-0,18)*26,45*0,37*0,9^(-0,63) = 8,648

Датчик обратной связи.
Передаточная функция ДУ имеет вид:
Кду
W (p)
= = 0,42 , где T=0
c.
(p)
= = 0,42 , где T=0
c.
Т*p+1
Кду=Uос/Rz=5/24=0,208.
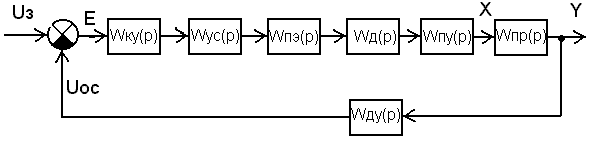 Структурная
схема САУ:
Структурная
схема САУ:
4. Анализ качества нескорректированной сау.
Анализ САУ на устойчивость проводим используя логарифмический критерий Найквиста. Для этого строим ЛЧХ нескорректированной системы. Её передаточная функция имеет вид:
![]()
Wн(p)=1,939*22*0,00905*8,64*0,208/(0,092*p+1)(0,86*p+1)( 0,211*p^2 + 1,0093*p +1)
Wн(p)=0,6938/(0,092*p+1)(0,86*p+1)(0,211*p^2+1,0093*p+1)
ЛАХ нескорректированной системы имеет вид:
![]()
ЛФХ нескорректированной системы имеет вид:
![]()
Частоты сопряжения:
T3=(Тя*Тм)^(1/2)=0,209
1=1/Т1=1/0,86=1,163; lg1=0,065;
2=1/T2=1/0,092=10,87; lg2=1,03;
3=1/T3=1/0,209=4,78;lg3=0,68.


При анализе построенных LН () ин() видим, что нескорректированная система является устойчивой, т.к.н() пересекает -1800(фаза выходного сигнала поворачивается на 1800) позже чемLН() пересекает ось частот. Но не выполняется поставленное условие=400,L6 дб.
При анализе переходного процесса нескорректированной системы видим, что переходный процесс монотонный с возрастающей во времени амплитудой колебаний. Переходный процесс устойчивый, система со временем стабилизируется, но установившееся значение выходной координаты далеко от необходимого значения. Время регулирование слишком велико.
Приходим к решению о необходимости коррекции САУ путем введения корректирующего устройства (КУ).