

6. Анализ устойчивости некорректированной сар.
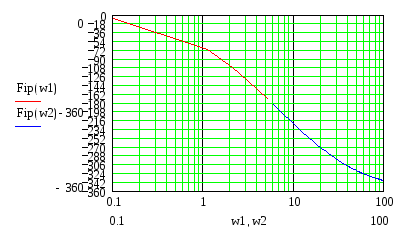
Анализ устойчивости произведём, используя логарифмические частотные характеристики, логарифмическим критерием устойчивости Найквиста. Для этого построим ЛАХ и ЛФХ разомкнутой системы.

Тогда: ЛАХ и ЛФХ
L(дб)
 lg(w)
lg(w)
(град)
 lg(w)
lg(w)
При анализе построенных ЛЧХ и ЛФХ видим, что нескорректированная система является неустойчивой, т.к. кривая ЛФХ пересекает –180 раньше, чем ЛАХ пересекает 0.
Следовательно, необходима коррекция САУ путем введения корректирующего устройства (КУ).
7. Синтез сар с заданными показателями качества.
Можно применить, например, последовательное интегро-дифференцирующее звено с передаточной функцией
W(p)=![]()
Примером интегродифференцирующего контура может служить схема












 R1
R1





 C2
C2
 C1
R2
C1
R2




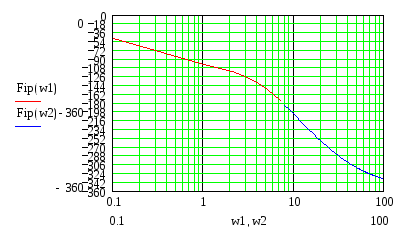
Логарифмические характеристики полученной системы:
L(дб)
 lg(w)
lg(w)
(град)
 lg(w)
lg(w)
Из графиков видно, что система имеет хорошие запасы устойчивости по модулю порядка 15 дб, по фазе порядка 50°. Быстродействие позволит системе быстро реагировать на возмущения, а параметры устойчивости не позволят вывести САР из равновесия.
8. Анализ качества сар.
Проанализируем переходные процессы в синтезированной САР:
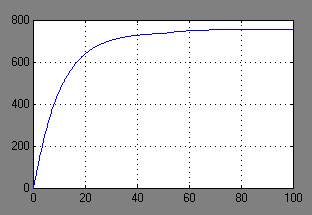
Для разомкнутой САР:
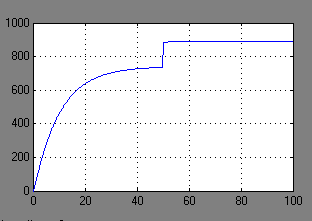
Переходной процесс выходной координаты при изменении управляющего воздействия для разомкнутой САР на 0.1 В на 50 с:
, C
Tпп
– время
переходного процесса- длительность за
который переходной процесс заканчивается.
Tн
– время нарастания.
Tз
– время
запаздывания.
Yуст
– установившееся значение выходной
координаты после окончания переходного
процесса. А он считается законченным,
когда выходная координата в последний
раз вошла в трубку точности и не вышла
из нее.
![]() - трубка точности
(5%).
- трубка точности
(5%).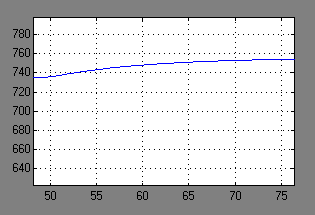 t,c (РИС 1)
t,c (РИС 1)
Отклонение выходной координаты порядка 30°
2. Переходный процесс выходной координаты при максимальном скачке возмущения на 50 с:
, C , C
 t,c
t,c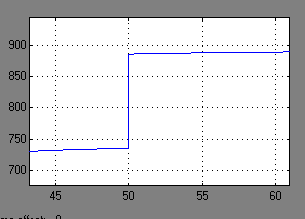 t,c(РИС
2)
t,c(РИС
2)
Для замкнутой разработанной САР.
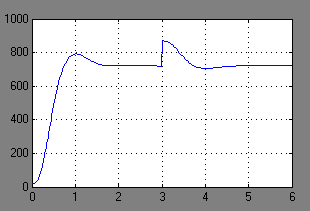
3. Переходной процесс выходной координаты при максимально возможном изменении управляющего воздействия для замкнутой САР(на 3 секунде):
, C , C
 t,c
t,c
 t,c(РИС 3)
t,c(РИС 3)
Переходный процесс выходной координаты при скачке возмущения(на 3 секунде):
, C , C
 t,c
t,c t,c(РИС
4)
t,c(РИС
4)
Отклонение выходной координаты порядка 3.2°
Графики переходных процессов наглядно показывают, что спроектированная САР удовлетворяет всем требованиям точности и быстродействия. Время переходного процесса 1.8с, перерегулирование 9.7%.
Время переходного процесса будет равно:
t = 1.8 c (рис 3)
оно показывает быстродействие системы
Перерегулирование:
![]()
![]()
Оно показывает склонность системы к колебаниям. Допустимое значение перерегулирования для той или иной системы может быть установлено на основании опыта эксплуатации подобных систем.
Графически требования к запасу устойчивости и быстродействию сводятся к тому, чтобы отклонение величины не выходило при единичном входном воздействии из некоторой области допустимых отклонений управляемой величины в переходном процессе.