

6. Исследование качественных показателей сау.
6.1. Определение устойчивости методом Гурвица.
Для определения устойчивости методом
Гурвица в общем виде необходимо для
характеристического уравнения замкнутой
системы составить квадратную матрицу
коэффициентов, содержащую nстрок иnстолбцов.
Критерий устойчивости сводится к тому,
что при![]() должны быть больше нуля всеnопределителей Гурвица, получаемых из
квадратной матрицы коэффициентов.
должны быть больше нуля всеnопределителей Гурвица, получаемых из
квадратной матрицы коэффициентов.
Воспользуемся частным случаем критерия устойчивости для системы третьего порядка:
Характеристическое уравнение выглядит следующим образом:
![]()
![]() .
.
Для устойчивости системы необходимо выполнение следующих условий:
![]()
![]()
![]()
![]()
Первые три условия выполняются, проверим последнее:
![]()
Так как все условия устойчивости выполняются, то система является устойчивой
6.2. Определение устойчивости методом Найквиста.
Критерий устойчивости Найквиста:
если разомкнутая система устойчива, то для устойчивости замкнутой системы необходимо и достаточно, чтобы АФЧХ разомкнутой системы не охватывала точку с координатами (-1; j0).
Для построения АФЧХ необходимо произвести
замену оператора
![]()
![]()
 .
.
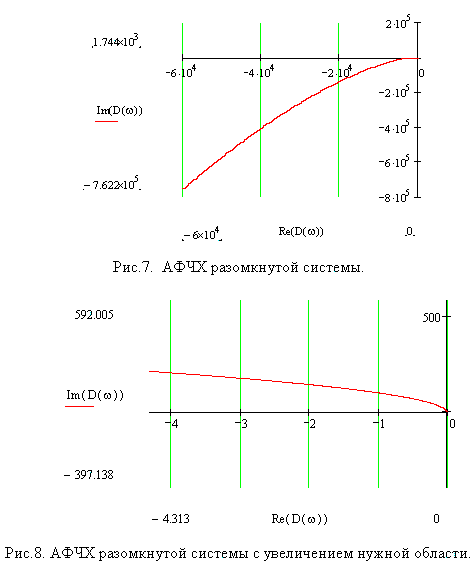
Так как график АФЧХ не охватывает точку с координатами (-1; j0), то система являетсяустойчивой.
6.3. Исследование устойчивости по годографу Михайлова.
Условие устойчивости Михайлова.
Для устойчивости линейной системы,
необходимо и достаточно, чтобы годограф
Михайлова начинался на положительной
части вещественной оси, при изменении
![]() от 0 до
от 0 до![]() ,
последовательно проходилnквадрантов, гдеn- порядок
передаточной функции.
,
последовательно проходилnквадрантов, гдеn- порядок
передаточной функции.
![]()


Как видно из графика годограф не охватывает 2 квадранта (n=2), что говорит о неустойчивости системы.
6.4. Определение запаса устойчивости по фазе и по усилению.
Запас устойчивости по фазе и по усилению
определяется по диаграммам Боде. Причем
система будет устойчива, если ее график
ЛАЧХ пересекает ось частот быстрее
нежели график ЛФЧХ пересечет линию
![]() .
.
В программе Matlabесть специальный оператор, который строит диаграммы Боде и показывает запас устойчивости по фазе и по усилению:
![]() ,
где
,
где![]() - передаточная функция разомкнутой
системы.
- передаточная функция разомкнутой
системы.
Диаграмма Боде приведены на рис.11.
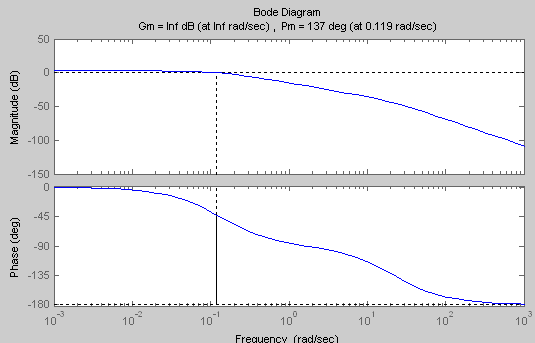
Рис.10. Диаграмма Боде для разомкнутой функции.
По этой диаграмме видно:
запас устойчивости по фазе равен -137 градусов
запас устойчивости по амплитуде стремиться к бесконечности.
Исходя из графиков можно сделать вывод о том, что система устойчива.
7. Учет нелинейности
Нелинейной системой автоматического управления называется такая система, которая содержит хотя бы одно звено, описываемое нелинейным уравнением.
В системе учтём нелинейность типа реле.
Вид этой нелинейности представлен ниже Рис.11.

Нелинейность типа реле.
Структурная схема исследуемой передаточной функции с учетом нелинейности приведена на рис.12.

Рис.12. Структурная схема исследуемой САУ с учетом нелинейности.

Рис.13. График переходной функции с учетом нелинейности
График переходной функции не удовлетворяет заданным условиям так как:
Большой коэффициент перерегулирования (43%);
количество колебаний не соответствует начальному значению
График не соответствует техническому заданию. Для того чтобы все условия удовлетворяли заданным нужно в схему поставить ПИД – контроллер и подобрать для него коэффициенты.

Рис.14. Структурная схема cNCDблоком для подбора коэффициентов.
ПИД-регулятора.
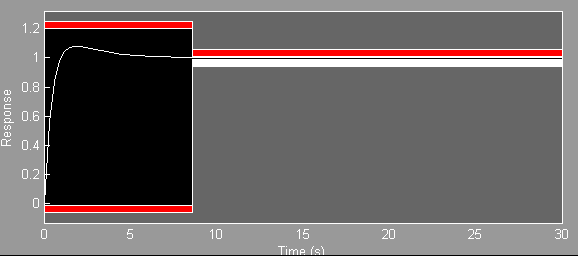
Рис.15. Использование блока NCD.
Коэффициенты оказались равными:
Kp=3,4624;Ki=1,423;Kd=1.
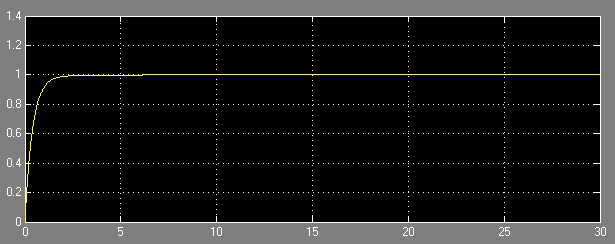
Рис.16. График переходного процесса системы с использованием ПИД-регулятора с оптимально подобранными коэффициентами.
Как видно переходный процесс удовлетворяет всем заданным параметрам:
Коэффициент перерегулирования
 =0%.
=0%.Установившаяся ошибка

Число колебаний
 .
.
Ниже приведена схема ПИД-регулятора:

Рис.17. Схема ПИД-регулятора