

1. Техническое задание на выполнение курсового проекта по теории автоматического управления
1. Разработать САУ температурой исследуемой жидкости.
2. Коэффициент
перерегулирования
![]() .
.
3. Количество колебаний
![]() .
.
4. Установившаяся
ошибка
![]() .
.
2. Описание функциональной и структурной схем САУ
Общая функциональная схема системы автоматического управления выглядит следующим образом:
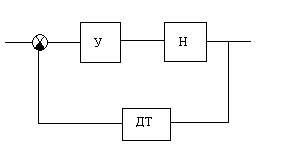
У-усилитель;
Н- нагреватель;
ДТ-датчик температуры.
Структурная схема линейной САУ выглядит следующим образом:
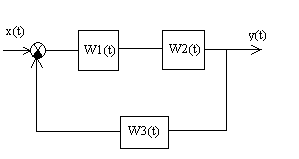
x(t) - задающее воздействие;
W1 (t) - передаточная функция усилителя мощности;
W2 (t) - передаточная функция нагревателя;
W3 (t) - передаточная функция датчика температуры;
y(t) - управляемая величина (температура).
3. Составление передаточных функций отдельных звеньев
1. Усилитель мощности
Усилитель мощности является безынерционным звеном, следовательно его передаточная функция – коэффициент усиления, которая записывается в следующем виде:
![]()
![]()
2. Передаточная функция терморегулирующего устройства Wтерм.
Будем считать, что скорость изменения температуры пропорциональна скорости изменения силы тока, которая, в свою очередь изменяется с изменением сопротивления терморегулятора. Тогда будет справедливо следующее соотношение:
![]()
Введем оператор Лапласа:
TтермрТ+Т=kтермI
Передаточная функция терморегулирующего устройства запишется в виде:
![]()
3. WTR – передаточная функция задающего устройства.
Увеличение сопротивления задающей ветки моста будет увеличивать температуру, которую мы в конечном итоге хотим получить. Необходимым условием при использовании в качестве датчика температуры терморезистора Pt-100 является условие минимального сопротивления сопряженной ветки моста Rmin=100 Ом.
Rзад – Rmin= Rmin*α×T.
Из этой формулы найдем передаточное отношение звена задающего воздействия (у терморезистора типа Pt-100 коэффициент α=3,9×10-3 К-1).
![]()
![]()
Мост настраивается так, что при заданной температуре, которую надо поддерживать неизменной, напряжение в диагонали моста равно нулю. Для этого необходимо, чтобы сопротивления в сопряженных ветках моста были равны. При неравенстве сопротивления терморезистора Rt сопротивлению Rзад в диагонали моста появляется напряжение, значение которого пропорционально разности сопротивлений задающего резистора и терморезистора.
4. Составление передаточной функции системы
Передаточная функция разомкнутой системы есть произведение передаточных функций усилителя мощности нагревателя жидкости:
![]() .
.
Передаточная функция замкнутой системы рассчитывается по следующей формуле:
![]()
5. Исследование сау в пакете Matlab
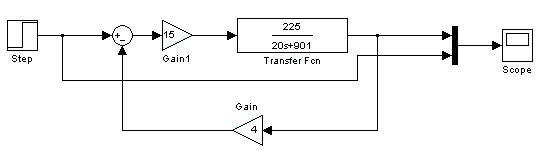
Рис.1. Структурная схема исследуемой передаточной функции.
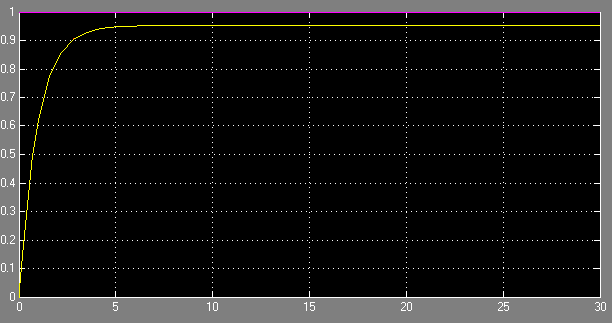
Рис.2. Переходная функция исследуемой САУ.
Из графика видно, что переходная функция не удовлетворяет техническому заданию:
график не выходит на единичное воздействие, ошибка стремится к бесконечности;
Для того, чтобы переходная функция соответствовала заданной, поставим в схему ПИД-регулятор и подберем для него коэффициенты. Для нахождения оптимальных коэффициентов воспользуемся NCD блоком.
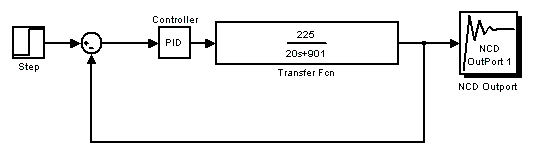
Рис.3. Структурная схема с использованием блока NCD.
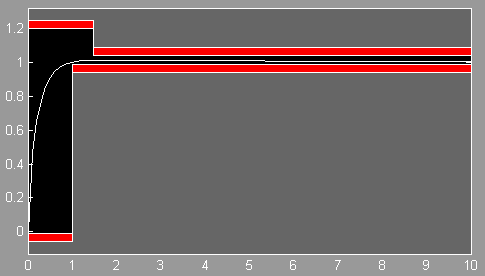
Рис.4. Использование блока NCD
При этом коэффициенты ПИД-регулятора оказались равными:
Kp=5,1229 Ki=0,6514 Kd=0,2367
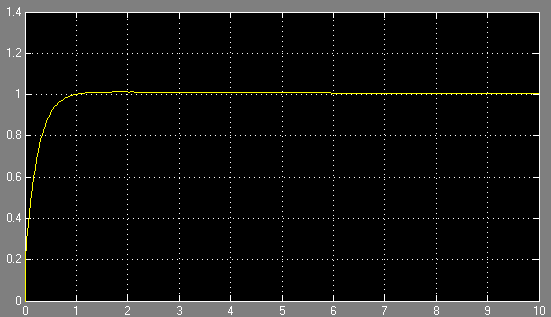
Рис.5. График переходного процесса с использованием ПИД-регулятора с оптимально подобранными коэффициентами.
Как видно переходная функция удовлетворяет всем заданным параметрам:
Коэффициент перерегулирования
 =0%.
=0%.Установившаяся ошибка
Число колебаний
 .
.
После установки ПИД – регулятора в схему, передаточные функции разомкнутой и замкнутой систем изменились. Найдем их:
![]() .
– передаточная
функция разомкнутой системы в общем
виде.
.
– передаточная
функция разомкнутой системы в общем
виде.
![]() .
– передаточная
функция ПИД-регулятора.
.
– передаточная
функция ПИД-регулятора.
![]() –передаточная
функция замкнутой системы.
–передаточная
функция замкнутой системы.
