

Принципы построения систем автоматического управления и регулирования
Любая система автоматического управления (регулирования) состоит из двух основных частей: объекта управления и управляющего устройства. Объект управления (регулирования) – это устройство, требуемый режим которого обеспечивается специально организованным управлением (аппарат, оборудование или технологический процесс и т.п.).
Управление объектом в автоматических системах осуществляется с помощью управляющего устройства (автоматического регулятора). Управляющее устройство – это устройство, осуществляющее воздействие на объект управления с целью обеспечения требуемого режима работы.
Состояние объекта определяется рядом величин. Те из них, по которым ведется управление, называются управляемыми (регулируемыми, выходными). Требуемое значение управляемой величины определяется задающим (командным, входным) воздействием, приложенным к входу управляющего устройства. Управляемые (выходные) величины изменяются под влиянием приложенных к объекту воздействий: управляющих (регулирующих) и возмущающих.
Управляющее (регулирующее) воздействие – это воздействие управляющего устройства (автоматического регулятора) на объект.
Возмущающее воздействие (помеха) – это все воздействия, вызывающие непланируемые изменения выходной величины (например, изменение нагрузки объекта). Возмущающие воздействия могут возникнуть и внутри самой автоматической системы в результате нарушения нормального функционирования ее отдельных элементов.
Совокупность взаимодействующих между собой объекта управления и управляющего устройства с целью управления объектом называется системой автоматического управления (регулирования) – САУ (САР). Задачи системы автоматического управления: компенсация влияния всех возмущающих воздействий и поддержание требуемого значения управляемой величины.
Закон изменения требуемого значения управляемой величины либо задается заранее, либо формируется в процессе работы системы.
Системы автоматического управления могут быть построены с использованием следующих принципов:
1) управление по разомкнутому циклу (по возмущению);
2) управление по замкнутому циклу (по отклонению, с обратной связью);
3) комбинированное управление.
В разомкнутых системах управления (рис. 2.1) действительное значение управляемой величины Хвых(t) не контролируется.

Рис. 2.1.
Разомкнутая система управления
управления
Управляющее воздействие Хр(t) формируется на основе информации о некоторых основных контролируемых возмущающих воздействиях fi(t). Поэтому такие системы часто называются системами управления по возмущению. Требуемый закон изменения управляемой величины определяется задающим воздействием Хвх(t).
Поскольку в таких системах компенсируется влияние не всех возмущающих воздействий, а только одного или нескольких основных, то точность их работы может оказаться не всегда удовлетворительной.
В замкнутых системах управления (рис. 2.2) контролируется действительное значение управляемой величины Хвых(t). Информация о ней используется для формирования управляющего воздействия Хр(t). Цепь, по которой информация об управляемой величине передается на управляющее устройство, называется главной обратной связью.
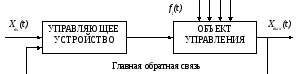
Рис. 2.2. Замкнутая
система управления управления
Отличительной особенностью замкнутых систем является их универсальность. Любое отклонение управляемой величины Хвых(t) от ее заданного значения Хвх(t) вызывает появление управляющего воздействия Хр(t), направленного на ликвидацию этого отклонения. Благодаря универсальности замкнутые системы получили преимущественное применение в технике.
В системах, работающих по принципу комбинированного управления, для формирования управляющего воздействия используется как информация о действительном значении управляемой величины, так информация об основных возмущающих воздействиях (рис. 2.3).
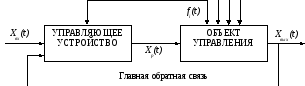
Рис. 2.3. Комбинированная
система управления управления
В дальнейшем будут рассмотрены вопросы теории автоматического управления применительно в основном к замкнутым системам автоматического управления (регулирования).
Функциональная схема типовой замкнутой системы автоматического управления, отражающая назначение входящих в состав управляющего устройства элементов, представлена на рис. 2.4.

Рис. 2.4.Функциональная
схема замкнутой системы управления
Функционально необходимыми элементами любой САУ в общем случае являются:
1) объект управления;
2) исполнительный элемент, который вырабатывает управляющее воздействие, прикладываемое к объекту управления;
3) усилительный элемент, осуществляющий необходимое преобразование сигнала ошибки и, в частности, его усиление по мощности;
4) измерительный элемент, служащий для измерения отклонения управляемой величины от заданного значения.
Кроме перечисленных элементов, в состав управляющего устройства могут входить последовательные корректирующие устройства, параллельные корректирующие устройства (местные обратные связи), предназначенные для придания системе требуемых динамических свойств.