

Замкнутые и разомкнутые системы управления
В разомкнутых системах управления (рис. 2.1) действительное значение управляемой величины Хвых(t) не контролируется.

Рис. 2.1.
Разомкнутая система управления
управления
Управляющее воздействие Хр(t) формируется на основе информации о некоторых основных контролируемых возмущающих воздействиях fi(t). Поэтому такие системы часто называются системами управления по возмущению. Требуемый закон изменения управляемой величины определяется задающим воздействием Хвх(t).
Поскольку в таких системах компенсируется влияние не всех возмущающих воздействий, а только одного или нескольких основных, то точность их работы может оказаться не всегда удовлетворительной.
В замкнутых системах управления (рис. 2.2) контролируется действительное значение управляемой величины Хвых(t). Информация о ней используется для формирования управляющего воздействия Хр(t). Цепь, по которой информация об управляемой величине передается на управляющее устройство, называется главной обратной связью.
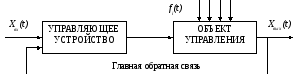
Рис. 2.2. Замкнутая
система управления управления
Отличительной особенностью замкнутых систем является их универсальность. Любое отклонение управляемой величины Хвых(t) от ее заданного значения Хвх(t) вызывает появление управляющего воздействия Хр(t), направленного на ликвидацию этого отклонения. Благодаря универсальности замкнутые системы получили преимущественное применение в технике.