

59 . Метод изоклин . Исследование н . Систем 2-го порядка на фазовой плоскости , типы особых точек .
Метод изоклин .
![]()
ненулевые Н . У .
![]() ;
;
![]() ;
;
![]() - уравнение фазовых траекторий .
- уравнение фазовых траекторий .
![]() -характеристическое уравнение системы
.
-характеристическое уравнение системы
.
![]() ;
;
![]() ;
;
![]()
1)
 ;
;
 ;
;
 ;
;
 ;
;
 ;a-tgугла наклона касательной к фазовой
траектории .
;a-tgугла наклона касательной к фазовой
траектории .
![]() ;
;
![]() - уравнение прямых с заданным наклоном
касательных к фазовой траектории =a(изоклины ) .
- уравнение прямых с заданным наклоном
касательных к фазовой траектории =a(изоклины ) .
Изоклина -линия для которой наклон касательных к фазовой траектории постоянен .
|
a= 0 ,x= 0 a=¥,v= 0 a= 1 ,x= -v a= - 1 , v = x
|
|

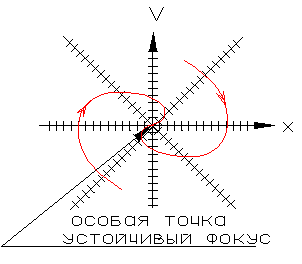
2)
 ;
;
![]() ; корни комплексно сопряженные .
; корни комплексно сопряженные .
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
|
a= 0 ,v= -x a= - 2 ,x=v a= -1 , x = 0
|
|
60 . Исследование релейной сау методом фазовой плоскости .
Релейные системы - системы с релейными нелинейными элементами .

![]() -автономная система .
-автономная система .
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() уравнение фазовых траекторий .
уравнение фазовых траекторий .

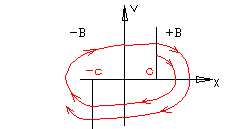
1)
 ;
;
 ;
;2)
 ;
;
 ;
;
 ;
;
 ;
;3)
 ;
;
 ;
;
 ;
;
 ;
;

|
1) фазовые траектории для системы с идеальным реле |
2) реле с зоной нечувствительности . |
|
|
|
|
3) реле с гистерезисом |
4) трехпозиционное реле с гистерезисом |
|
|
|



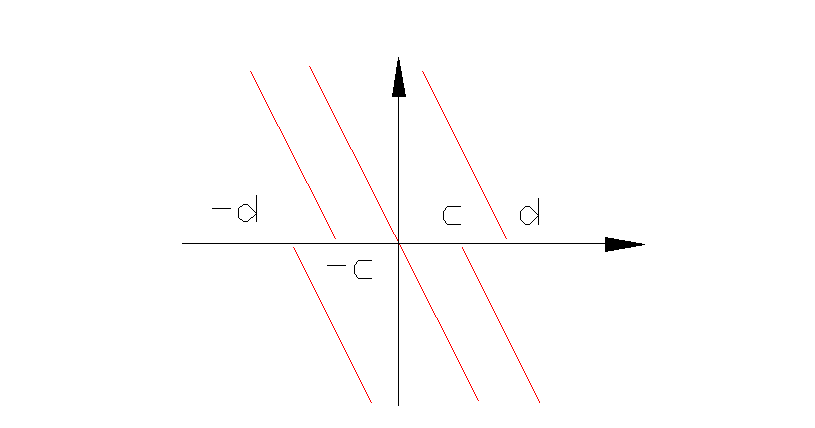
61 . Коррекция релейных систем по скорости .

d=x+av;
|
а) d= 0 , x+av= 0 ; x= -av; v = - x / a ; tg j= - a .
|
|
|
|
б) d=
|
|
|
|
в) d
=
|
|
|
|
г)
d
=
|
|
|
|
|
|
|









62 . Коррекция релейных систем с помощью жесткой обратной связи .

![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
 ;
;
![]() ;
;
![]() ;
;
 ;
;
1)
 ;
;
 ;
;
 ;
;2)
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
![]() ;
;
3)
 ;
;
 ;
;
 ;
;
![]()
![]()
![]() ;
;
![]()
![]() ;
;
![]()
![]() ;
;


|
а) идеальное реле |
б) реле с зоной нечувствительности |
|
|
|
|
с) реле с гистерезисом |
d) трехпозиционное реле с гистерезисом |
|
|
|




63 . Особенности динамики нелинейных систем . Скользящий режим .
1) В отличии от линейных систем нелинейные системы могут иметь несколько положений равновесия и даже линии покоя .
2) На фазовой плоскости могут быть области с различным характером движения .
|
|
|
|
Предельные циклы: 1-неустойчивый 2- устойчивый |
Замкнутые траектории , разделяющие области с разным характером движения называются предельными циклами , а разомкнутые сепаратриссы . |


Скользящие режимы возникают в релейных системах при коррекции по скорости . В скользящем режиме реле работает в вибрационном режиме . Изображающая точка движется вдоль линии переключения .
|
a<>0 |
|
|
|
Скользящие режимы применяются в технических системах , поскольку позволяют перемещать изображающую точку по заданной траектории . |

 На
выходе Н Э
На
выходе Н Э
Экзаменационные вопросы по оау.
3-й курс факультета ЭАПТ 1998-1999 учебный год
Лектор Ягодкина т.В.
1.Из истории автоматики.
Автоматика (самодействие по-гречески). Первые самодействующие установки были известны еще до нашей эры, например « Храм Солнца ».
Средние века: мельницы (водяные и ветряные), андроиды (механизмы имитриующие работу людей, например художников и пр.). Все эти механизмы работали по разомкнутому принципу.
Основу современных систем автоматического управления положили 2 работы:
а) Регулятор уровня воды в котле Ползунова.
б) Регулятор скорости маховика Уатта.
В последнем устройстве скорость вращения передавалась через регулятор на заслонку, регулирующую подачу пара в машину.
Основу современной теории АУ положили работы Вышнеградского, который исследовал устойчивость паровых машин. Также проблемами устойчивости занимались: Жуковский, Вознесенский, Ляпунов.
Циолковский разработал устройство управления рулем дирижабля, положил начало разработки автопилота.1-й автопилот разработал Барановский. Давыдов в 1912 году перед гражданской войной разработал устройство слежения орудия за подвижными и неподвижными целями (1-ая следящая система).