

I.5. Пропорционально-интегрально-дифференциальные регуляторы
Пропорционально-интегрально-дифференциальные регуляторы могут быть сконструированы по структурной схеме идеального ПИД-регулятора. Так как фактическая реализация идеального дифференцирующего звена в общем случае представляет большие трудности, то в практических схемах используется реальное дифференцирующее звено Wд(р)=kД ТДр/( ТДр+1). Для уменьшения погрешности в реализации закона ПИД-регулирования исполнительный механизм, как и в случае реализации закона ПИ-регулирования по схеме рис. 3, а, охватывается отрицательной обратной связью с передаточной функцией Wo.c(p) =kо.с. С учетом этого структурная схема такого реального ПИД-регулятора имеет вид, представленный на рис. 4, a.
Передаточная функция регулятора
![]()

или
(2)
При соблюдении условия (1.11) приближенную передаточную функцию (2) можно
записать в виде
Wр(p) = kp + 1/(Ти р) + kдTд р/(Tдр + 1) (2.1)
Параметрами настройки ПИД-регулятора являются kp, Ти, kд и Тд..

Рис. 5. Характер реализации закона ПИД-регулирования регулятором со структурной схемой, приведенной на рис. 3,11.
Для практической реализации закона ПИД-регулирования применяются или ПИД-регуляторы (рис. 5, а и б) или ПИ-регуляторы (рис. 3,а и б) в комплекте с дифференциаторами Wд(р)=kД ТДр/( ТДр+1).
На рис.5,в представлена структурная схема, в которой закон ПИД-регулирования реализуется за счет динамических свойств канала обратной связи, охватывающего как усилительную, так и исполнительную часть регулятора.
Для реализации ПИД-регулятора со структурной схемой, приведенной на рис. 5, необходимо, чтобы канал обратной связи состоял из последовательно включенных апериодического и реального дифференцирующею звеньев.
Так как условие (1.11) в структурной схеме на рис. 5,в реализуется приближенно, то исполнительный механизм вносит искажения в закон ПИД-регулирования. Фактическая реакция регулятора на ступенчатое входное воздействие имеет вид кривой 1. на рис. 6 при идеальной реакции ПИД-регулятора, представленной прямыми 2.

Рис. 6. Характер реализации закона ПИД-регулирования
регулятором со структурной схемой, приведенной на рис. 3,а .
Таким образом, реальные ПИД-регуляторы со структурными схемами на рис. 5 реализуют законы ПИД-регулирования с погрешностью, зависящей от степени соблюдения условия (1.11) и параметров настройки дифференцирующей части в схемах на рис. 5,аиб.
Следует отметить, что промышленные ПИД-регуляторы со структурными схемами на рис. 5, а и б могут реализовать различные законы регулирования с любым сочетанием из П-, И- и Д-составляющих закона ПИД-регулирования.
I.6. Позиционные регуляторы.
Позиционные регуляторы работают по принципу «включено-выключено». Их реализация осуществляется, например, с помощью контактных и бесконтактных релейных элементов.
Позиционные регуляторы бывают двух-, трех- и многопозиционными.
Н а
рис. 7 приведены структурная схема и
статические характеристики двухпозиционных
регуляторов. Двухпозиционные регуляторы
настраиваются таким образом, чтобы
значенияиотсчитывались в приращениях от условного
равновесного состояния объекта
регулирования, соответствующего
расчетным значениям0и0, принятым
за начало отсчета. При этом статическая
характеристика двухпозиционного
регулятора без зоны нечувствительности
примет вид, представленный на рис. 7б,с зоной нечувствительности–на рис.
7в.
а
рис. 7 приведены структурная схема и
статические характеристики двухпозиционных
регуляторов. Двухпозиционные регуляторы
настраиваются таким образом, чтобы
значенияиотсчитывались в приращениях от условного
равновесного состояния объекта
регулирования, соответствующего
расчетным значениям0и0, принятым
за начало отсчета. При этом статическая
характеристика двухпозиционного
регулятора без зоны нечувствительности
примет вид, представленный на рис. 7б,с зоной нечувствительности–на рис.
7в.
Рис.7. Структурная схема (а) и статические характеристики без зоны нечувствительности (б) и с зоной нечувствительности (в) двух позиционного регулятора; ДР — двухпозиционный регулятор.
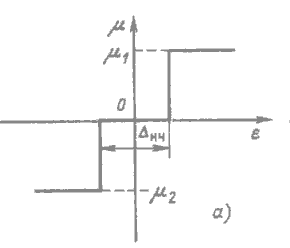
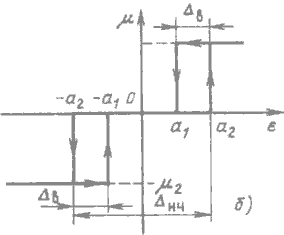
Рис. 8. Статические характеристики трехпозиционных регуляторов без зон нечувствительности (а) и с зонами нечувствительности (б).
Аналитическая статическая характеристика двухпозиционного регулятора без зоны нечувствительности запишется в виде:
=1 при 0;
=-2 при 0, (2.2)
а с зоной нечувствительности–в виде
=1 при а;
=-2 при ≤-а;
=1 при -а <<а и d/dt<0;
=-2 при -а <<а и d/dt>0. (2.3)
Из (2.2) и (2.3), а также из рис. 7, б и в следует, что двухпозиционные регуляторы постоянно оказывают на объект регулирования воздействия, отличные от их значений, необходимых для равновесного состояния системы (при =0). В результате этого автоматическая система с двухпозиционным регулятором будет работать в автоколебательном режиме в окрестностях ее равновесного состояния.
На рис.9 дан пример структурной схемы многопозиционного регулятора и его статических характеристик без зон неоднозначности и с зонами неоднозначности.
Из структурной схемы на рис.9, а многопозиционного регулятора следует, что его можно представить как несколько двухпозиционных регуляторов с различными установками их срабатывания, соединенными последовательно.
Отклонение регулируемой величины от заданного значения ε поступает на входы всех двухпозиционных регуляторов. Основной двухпозиционный регулятор ДРо срабатывает при изменении знака ε. Например, при ε > 0 регулятор ДРо срабатывает и на его выходе появляется регулирующий сигнал μо. Если этого регулирующего воздействия оказывается недостаточно и отклонение продолжает возрастать, то при ε Δg1>0 срабатывает регулятор ДР1б и на выходе многопозиционного регулятора появляется дополнительное регулирующее воздействие μ1б. Результирующее воздействие на выходе будет равно μ=μо+μ1Б. В общем случае таких дополнительных регуляторов может быть несколько и при возрастании ε результирующее регулирующее воздействие может быть равно
![]()
где n – число двухпозиционных регуляторов ДРIБ, включившихся при возрастании ε.
Если при очередном включении i-го двухпозиционного регулятора отклонение ε начнет уменьшаться, то регуляторы поочередно в обратной последовательности начнут отключаться.
Аналогично работает многопозиционный регулятор при отклонении ε в обратную сторону, т.е. при ε<0.
Результирующее воздействие многопозиционного регулятора при этом будет равно
![]()
где m – число двухпозиционных регуляторов ДРjM, включившихся при уменьшении ε в сторону ε<0.
Статическая характеристика многопозиционного регулятора без зон нечувствительности составляющих двухпозиционных регуляторов представлена на рис.9,б, а при наличии зон неоднозначности – на рис.9,в.
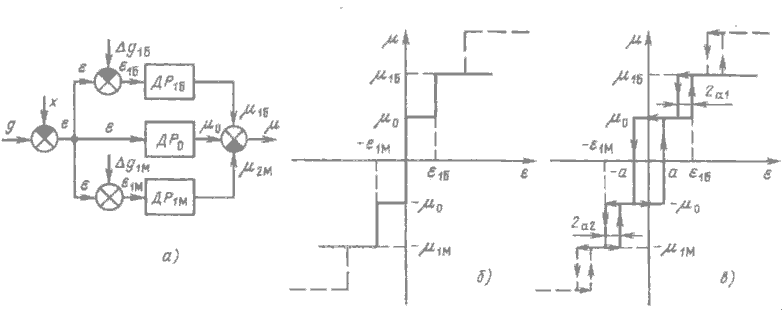
Рис. 9. Пример структурной схемы (а) и статических характеристик без зон неоднозначности (б) и с зонами неоднозначности (в) многопозиционного регулятора
I.7. Автоматические регуляторы прямого действия.
В регуляторах прямого действия воздействие регулируемой величины на первичный измерительный преобразователь регулятора служит источником энергии как для формирования закона регулирования, так и для перемещения регулирующего органа. К этим регуляторам энергия извне не подводится. Автоматические регуляторы получили широкое распространение в системах стабилизации давления, расхода, уровня, температуры и т. д.
В качестве примера на рис.10 представлен автоматический регулятор давления прямого действия, поддерживающий заданное значение давления среды в трубопроводе после регулирующего клапана, т. е. «после себя».
Регулятор выполнен в виде клапана с мембранным приводом. На мембрану 1 воздействуют давление измеряемой среды и противодействующая пружина 2.
При заданном значении давления условие равновесия сил, воздействующих на мембрану, запишется в виде
![]() (2.4)
(2.4)
где р — заданное значение давления в трубопроводе; fм — эффективная площадь мембраны 1; с—жесткость пружины 2; l—перемещение клапана 5, жестко соединенного штоком 4 с мембраной 1.
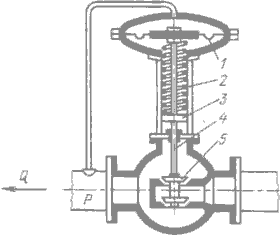
Рис. 10. Автоматический регулятор давления прямого действия.
Если давление р увеличится на значение Δр, например, в результате расхода среды Q потребителем, то мембрана 1 прогнется вниз, перемещая клапан на расстояние Δl, при котором сила сжатия пружины уравновесит возросшее давление среды на мембрану.
Новое условие равновесия сил на мембране запишется в виде (р+Δр)fм=с(l+ Δl) или Δрfм=с Δl, откуда Δl= Δрfм/с (2.6)
Таким образом, в приращениях от заданного равновесного состояния, регулятор прямого действия, приведенный на рис. 10, формирует пропорциональный закон регулирования
μ=kрε (2.7), где ε=Δр=рε–входная величина, равная отклонению давления от заданного значения; μ= Δl–выходная величина, равная равная приращению перемещения клапана; kр= fм/с–коэффициент передачи регулятора.
Заданное значение давления (регулируемой величины) устанавливается изменением натяжения пружины 2 (меняется жесткость с пружины) путем вращения натяжной гайки 3.
Регуляторы давления.
Автоматические регуляторы давления предназначаются для поддержания или изменения по определенному закону давления воздуха, газов, жидкостей в различных устройствах. В зависимости от конкретных эксплуатационных условий к таким регуляторам предъявляются различные требования, основными из которых являются точность, надежность, простота настройки и широкий диапазон регулирования. Кроме того, такие регуляторы не должны нарушать герметичность агрегатов, в которых они применяются, и должны обеспечивать пожаровзрывоопасность при работе в газовых и других агрессивных средах.
Функциональная схема одного из возможных регуляторов давления представлена на рис.11 и включает в себя задающую часть в виде в виде напряжения U0, элемент сравнения, усилительно-преобразовательное устройство, исполнительный двигатель Дв, регулирующий клапан РК, связанный с валом исполнительного двигателя через редуктор и шток с червячной передачей, объект регулирования ОР (например, котел или часть трубопровода), а также датчик давления ДД, являющийся датчиком обратной связи.
Исполнительный двигатель приоткрывает регулирующий клапан РК, если давление Ркв котле превышает требуемое значение, и, наоборот, закрывает клапан, когда давление в котле падает. Таким образом, автоматический регулятор поддерживает заданное значение Ркв объекте регулирования. При необходимости можно осуществить регулирование давления по заранее заданному закону.
Датчики давления в регуляторах, подобных приведенному на рис.11, используются для измерения действительного значения давления воздуха, газа или жидкости в объекте регулирования. Точность и надежность АР давления во многом определяются свойствами датчика давления.

Рис.11
Для измерения давления известны различные методы, однако наиболее широко применяется пружинный метод, основанный на зависимости деформации упругого чувствительного элемента от приложенного давления. Чувствительным элементом могут служить плоские или гофрированные мембраны, сильфоны и т.д.
В результате действия сил измеряемого давления Р происходит деформация и перемещение упругих чувствительных элементов, в данном случае жесткого центра 2 мембранной коробки 1, которое в свою очередь с помощью простейшего устройства 3 может быть преобразовано в угловое перемещение. Чаще всего для преобразования углового или линейного перемещения в электрический сигнал используются потенциометрические или индукционные преобразователи.
Устройства типа показанного на рис.12 , измеряющие положительные избыточные давления, называются манометрами.
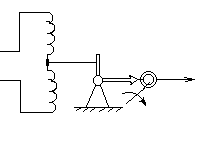
Рис. 12
П ередаточная
функция нескорректированного АР
давления, представленного на рис11 , в
упрощенном виде записывается как
ередаточная
функция нескорректированного АР
давления, представленного на рис11 , в
упрощенном виде записывается как
где То–постоянная времени объекта регулирования;–временное запаздывание в объекте регулирования.