

I.4. Пропорционально-интегральные регуляторы
Идеальный ПИ-регулятор имеет передаточную функцию, определяемую выражением
![]()
или
![]()
При применении в регуляторе ИМ с передаточной функцией WИМ(p)=1/TИМ p
структурная схема регулятора может разрабатываться в нескольких вариантах, основные из которых представлены на рис. 3.
По структурной схеме, приведенной на рис. 3, и, формирование ПИ-закона регулирования осуществляется так же, как и в идеальных ПИ-регуляторах. Для уменьшения отрицательного влияния на закон ПИ-регулирования исполнительного механизма его охватывают отрицательной обратной связью в виде усилительного звена с передаточной функцией Wo.c.(p) = kо.с.
Передаточная функция реального ПИ-регулятора со структурной схемой, приведенной на рис. 3, а, запишется в следующем виде:
(1.7)
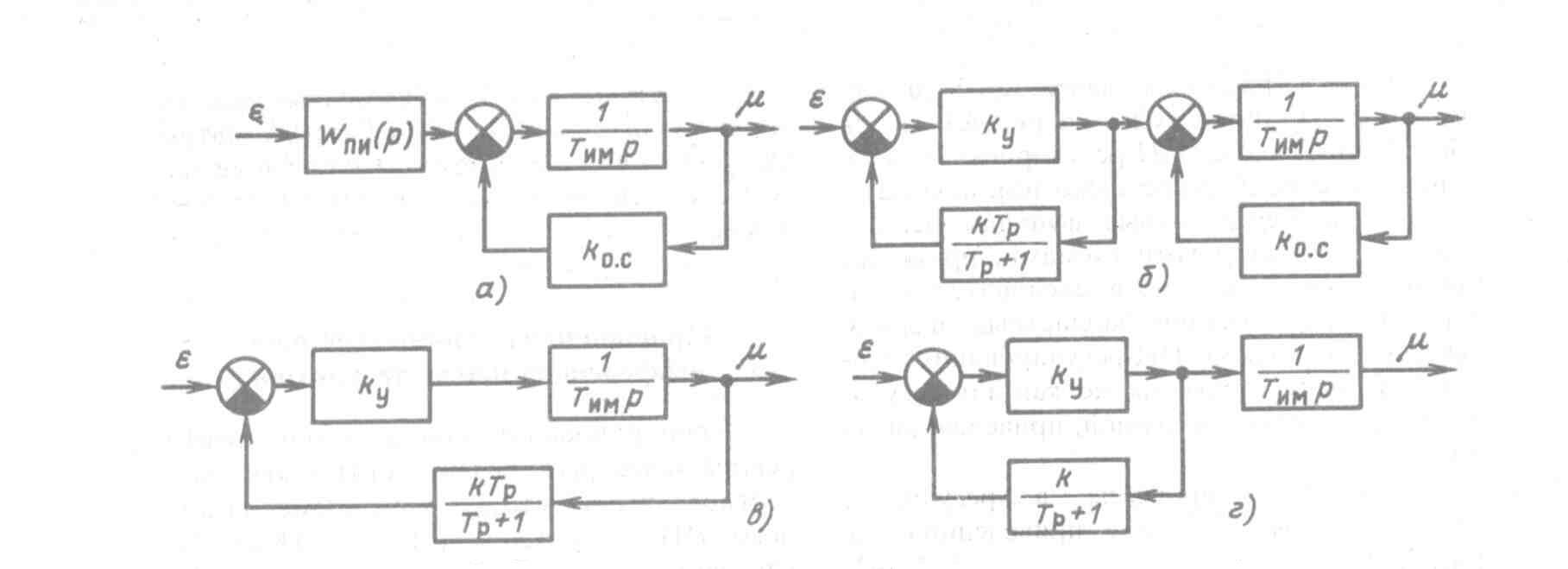
Рис. 3. Структурные схемы промышленных ПИ-регуляторов.
Таким образом, реальный ПИ-регулятор со структурной схемой, приведенной на рис. 3, а,реализует закон ПИ-регулирования с погрешностью, определяемой балластным апериодическим звеном (1.5).
Постоянная времени балластного звена
Тб=ТИМ/ko.c. (1.8)
Из (1.8) следует, что чем больше ko.c. тем меньше Тб и тем меньше погрешность реализации закона ПИ-регулирования.
Однако при этом следует иметь в виду, что при увеличении ko.c. уменьшается коэффициент передачи ПИ-регулятора, который согласно (1.7) равен отношению kp /ko.c. Для сохранения требуемого значения коэффициента передачи регулятора одновременно с увеличением kо.с. следует пропорционально увеличивать kр.
На рис. 3,б приведена структурная схема, в которой закон ПИ-регулирования реализуется за счет динамических свойств канала обратной связи, охватывающего усилительную часть регулятора.
При соблюдении обоими каналами обратной связи, показанной на рис. 3,б, условия (1.11) согласно W(p)=1/Wo.c (p) необходимая передаточная функция канала обратной связи может быть найдена из выражения

(1.9)
Таким образом, для того чтобы структурная схема на рис. 3, бреализовала ПИ-закон регулирования, необходимо канал обратной связи, охватывающий усилительную часть регулятора, выполнить в виде реального дифференцирующего звена.
На рис. 3, в приведена структурная схема, в которой закон ПИ-регулирования реализуется за счет динамических свойств канала обратной связи, охватывающего как усилительную, так и исполнительную часть регулятора. Необходимая передаточная функция обратной связи в этом случае, так же как и для схемы на рис. 3,б, должна определяться выражением Wo.c (p)=kTp/(Тр+1), но при
k = 1/kp.
На рис. 3, г приведена структурная схема регулятора, имеющая принципиальное отличие от схем на рис. 3, а—в, заключающееся в том, что в ней динамические свойства интегрирующего исполнительного механизма использованы для формирования закона ПИ-регулирования.
В![]() этом случае необходимую передаточную
функцию канала обратной связи можно
найти из условия
этом случае необходимую передаточную
функцию канала обратной связи можно
найти из условия
Е сли
передаточная функция регулятора
определяется выражениемWПИ(р)=kр(Тизр+1)/Тизр,
то
сли
передаточная функция регулятора
определяется выражениемWПИ(р)=kр(Тизр+1)/Тизр,
то
Таким образом, в качестве обратной связи в структурной схеме на рис. 3, г для обеспечения закона ПИ-регулирования применяют апериодическое звено.
Точные передаточные функции регуляторов со структурными схемами, приведенными на рис. 3,6—г, а следовательно, и передаточные функции балластных звеньев, искажающих закон ПИ-регулирования, могут быть определены так же, как для регулятора со структурной схемой, приведенной на рис. 3,a.
Так как исполнительный механизм регулятора при монтаже располагается непосредственно у объекта регулирования, а аппаратурная часть регулятора размещается, как правило, в пункте управления объектом, то при выборе структурной схемы регулятора при прочих равных условиях следует иметь в виду, что схема на рис. 3, г требует меньшего расхода кабельно-проводниковых материалов (при электрическом исполнительном механизме) или труб (при пневматическом или гидравлическом исполнительном механизме).
Следует отметить, что балластное звено в виде апериодического звена (1.5) как в ПИ-регуляторе (1.7), так и в П-регуляторе (1.3) часто оказывает положительное влияние на процесс регулирования. Так, при кратковременных отклонениях регулируемой величины благодаря демпфированию балластного звена исполнительный механизм автоматической системы с таким регулятором не срабатывает, что повышает срок его службы.
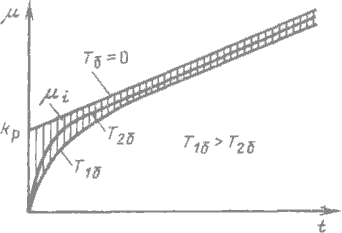
Рис. 3.1. Характер реализации закона ПИ-регулирования регулятором со структурной схемой, приведенной на рис. 3, а.