

2. Реализация типовых законов регулирования.
При реализации реальных автоматических регуляторов не всегда точно удается обеспечить тот или иной желаемый типовой закон регулирования. Это объясняется в первую очередь инерционностью исполнительных механизмов, а при реализации дифференциальной составляющей закона регулирования–невозможностью практической реализации идеального дифференцирующего звена. В связи с этим важно определить степень погрешности в формировании законов регулирования промышленными регуляторами.
Рассмотрим общий принцип построения желаемой структуры автоматических регуляторов. При охвате какого-либо участка схемы с передаточной функцией Wу.с.(р), состоящего из нескольких звеньев, отрицательной обратной связьюWо.с(р), передаточная функция такого соединения будет равна
![]() (1)
(1)
и![]() ли
ли
(1.1)
I.3. Пропорциональные регуляторы
Идеальный П-регулятор имеет передаточную функцию вида Wп(р)=k(р). Реальный аналоговый промышленный регулятор должен иметь усилительное звено с передаточной функциейWу(р)=kу и исполнительное устройство, например в виде электрического исполнительного механизма (ИМ) с передаточной функциейWИМ=1/ТИМр.Электрический ИМ является интегрирующим звеном, и, следовательно, для получения П-закона регулирования его необходимо охватить отрицательной обратной связью. Для обеспечения условияWо.с.(р)1/Wу.с.(р) (1.11) с целью повышения коэффициента передачи прямого канала этой отрицательной обратной связью следует охватить и усилительное звено с передаточной функциейWу.(р)=kу регулятора.
Требуемую передаточную функцию канала обратной связи найдем из условия:
WП(p)=kp=1/Wo.c.(p),
откуда
Wo.c.(p)=1/ kp= ko.c (1.2)
Таким образом, канал обратной связи должен быть выполнен в виде усилительного звена с коэффициентом передачи ko.c=1/ kp, т. е. равным обратному значению коэффициента передачи П-регулятора.
С учетом изложенного структурная схема реального П-регулятора должна иметь вид, представленный на рис. 2.
Оценим точность реализации П-закона регулирования реальным П-регулятором со структурной схемой, приведенной на рис.2.
Найдем передаточную функцию П-регулятора:
![]()
(1.3)
Таким образом, реальный П-регулятор со структурной схемой на рис.2 представляется в виде последовательного соединения П-регулятора с передаточной функцией
WП(p)= kp= 1/ ko.c. (1.4)
и некоторого балластного звена с передаточной функцией
Wб(p)=1/(Tбp+1) (1.5)
Балластное звено является апериодическим звеном . Коэффициент передачи балластного звена равен единице, а постоянная времени
Tб=ТИМ/kу kо.с. (1.6)
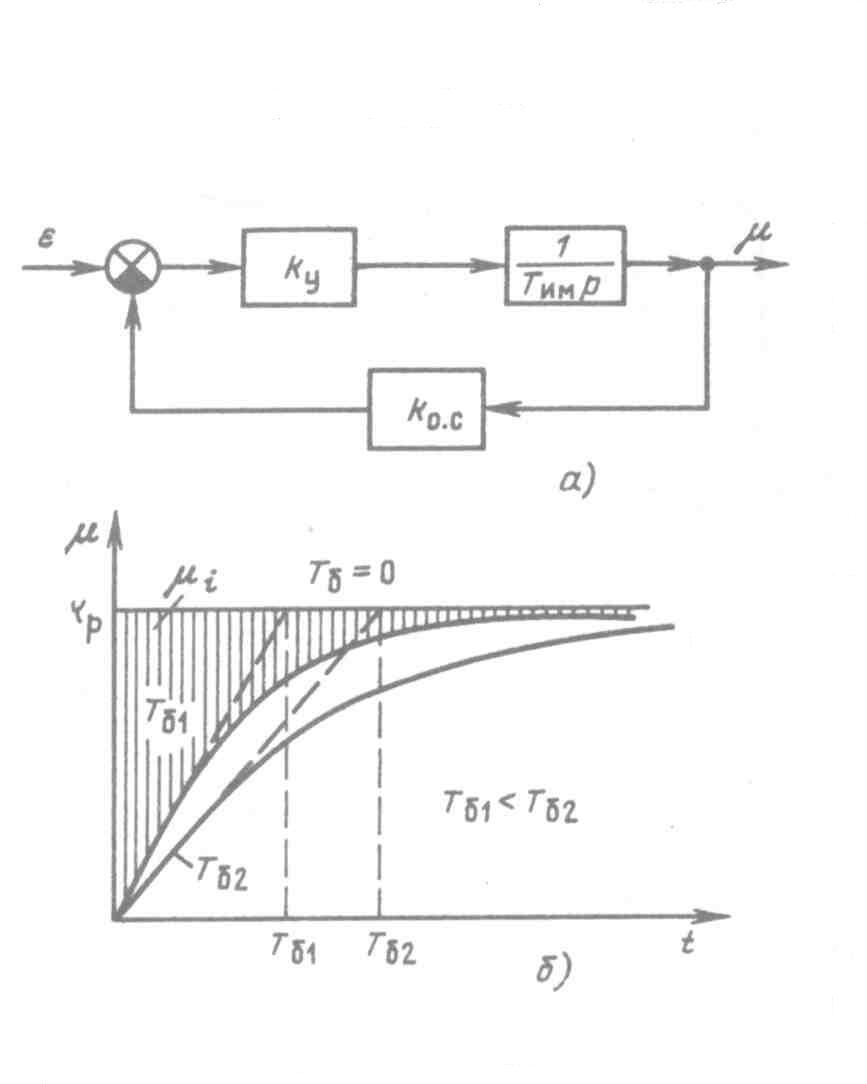
Рис. 2. Структурная схема П-регулятора (а) и реализуемый ею закон П-регулирования (б).
Переходная характеристика реального П-регулятора со структурной схемой, приведенной на рис. 2,а представлена на рис.2,б.
Параметром настройки регулятора является коэффициент передачи ko.c устройства обратной связи.
Чем меньше (больше) ko.c, тем больше (меньше) коэффициент kp передачи регулятора (1.4)
Одновременно следует иметь в виду, что чем больше kp, тем больше постоянная времени (1.6) балластного звена и тем больше искажается идеальный закон П-регулирования.
Для уменьшения влияния балластного звена при конструировании П-регулятора по структурной схеме, приведенной на рис. 2, а, следует стремиться к максимально возможному значению коэффициента усиления ky.
Текущее значение μi динамической ошибки реализации закона П-регулирования при Tб = Tб1 показано на рис. 2,6.