

Для правильной работы синхронно-следящей системы необходимо, чтобы на всем диапазоне управления имелось бы только одно устойчивое положение, соответствующее углу рассогласования
δ = 0. Однако из рассмотрения кривых (рис. 8, а) следует, что при четком передаточном отношении редукторов возникает второй устойчивый нуль при угле рассогласования δ= 180°,
называемый ложным нулем. Ложный нуль можно устранить за счет применения ускоряющих редукторов с нечетным передаточным отношением или путем соответствующего изменения кривой напряжения сельсина грубого отсчета. С этой целью на напряжение грубого отсчета накладывают напряжение смещения (порядка нескольких вольт) от специального трансформатора смещения (рис. 8, б). Начальное напряжение грубого отсчета при δ = 0 устраняется смещением статора сельсина грубого отсчета на угол Δδ (рис. 8, в).
Электрические исполнительные устройства следящих систем.
Наибольшее распространение в электрических следящих системах в качестве исполнительных устройств получили двухфазные асинхронные двигатели и двигатели постоянного тока с независимым возбуждением.

Рис.9
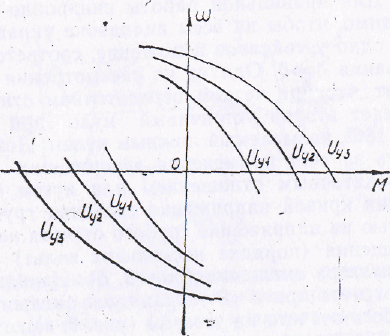
Схема управления двухфазным асинхронным двигателем и семейство механических характеристик приведены на рис 9 и 10.
Передаточная функция двигателя, определяемая на основе паспортных данных двигателя, может быть записана в виде
![]()
(15)
где![]() —
коэффициент передачи, рад/В*с;
—
коэффициент передачи, рад/В*с;
![]()
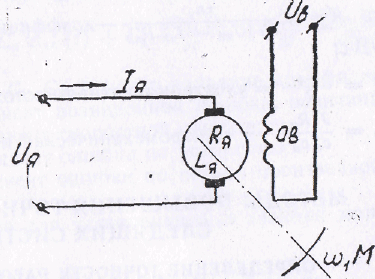
Рис.11
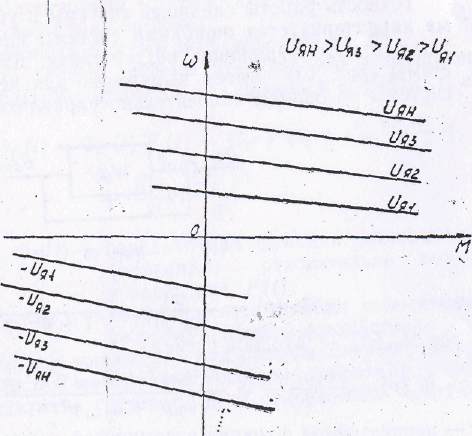
Рис.12
![]() — постоянная
времени двигателя (с).
— постоянная
времени двигателя (с).
Для двигателя постоянного тока при управлении напряжением на якоре (ФB = сonst) схема управления и механические характеристики имеют вид (рис. 11 и 12) Передаточная функция для этого случая может быть записана в виде
![]() ,
(16)
,
(16)
здесь
![]() —
коэффициент
передачи двигателя, рад/В*с;
—
коэффициент
передачи двигателя, рад/В*с;
![]() —
электромагнитная
постоянная времени, с;
—
электромагнитная
постоянная времени, с;
![]() —
электромеханическая
постоянная времени, с
—
электромеханическая
постоянная времени, с
МЕТОДЫ ПОВЫШЕНИЯ ТОЧНОСТИ РАБОТЫ
СЛЕДЯЩИХ СИСТЕМ.
ОПРЕДЕЛЕНИЕ ТОЧНОСТИ РАБОТЫ СИСТЕМЫ ПО КОЭФФИЦИЕНТАМ ОШИБКИ
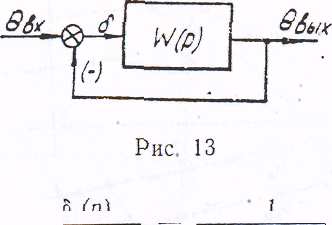
Точность работы следящей системы в установившемся режиме характеризуется ошибками системы, как при управляющем, так и при возмущающих воздействиях. Для одноконтурной системы (рис. 13) имеем выражение для передаточной функции системы по ошибке относительно управляющего воздействия
![]() ,
(17)
,
(17)
где
![]() —
входной сигнал;
—
входной сигнал;
 —
передаточная
функция разомкнутой системы;
—
передаточная
функция разомкнутой системы;
![]() — порядок астатизма.
— порядок астатизма.
Тогда изображение ошибки запишется в виде
![]() (18)
(18)
Разложим
передаточную функцию по ошибке
![]() в
ряд по
возрастающим степеням оператора р
в
ряд по
возрастающим степеням оператора р
![]() (19)
(19)
Переходя в выражении (19) к оригиналу, получим соотношение для установившейся ошибки
![]() (20)
(20)
Величины Со, С1,С2 ... носят название коэффициентов ошибки:
С0 — коэффициент позиционной ошибки, величина статизма;
C1 — коэффициент скоростной ошибки;
С2 — коэффициент ошибки по ускорению;
С3 — коэффициент ошибки по первой производной от ускорения и т. д.
Выражение для установившейся ошибки может быть записано в виде
![]() (21)
(21)
где
![]() — позиционная (статическая) ошибка;
— позиционная (статическая) ошибка;
δω — скоростная ошибка;
δε — ошибка системы по ускорению и т. д.
Точность работы системы относительно возмущающего действия F(t) определяется аналогичным образом, т. е.
![]() (22)
(22)
здесь ФF(t)—передаточная функция системы по ошибке (оригинал) относительно
возмущающего воздействия, F(t);
![]()
— коэффициенты ошибки относительно данного возмущающего воздействия.
Рассмотрим
выражение для коэффициентов ошибки для
различных
систем автоматического регулирования
в функции порядка
астатизма системы. Для статической
системы (![]() = 0) имеем
= 0) имеем
![]()
![]()
(23)![]()
где K— коэффициент усиления разомкнутой системы;
а1, а2,…,b1, b2 — коэффициенты дробно-рациональной передаточной функции разомкнутой системы W(p)
Для
астатической системы первого порядка
(![]() =1)
=1)
![]() ,
,
![]()
(24)
здесь
![]() — добротность системы по скорости
(1/c).
— добротность системы по скорости
(1/c).
Для
астатической системы второго, порядка
(![]() = 2)
= 2)
![]()
![]()
![]() (25)
(25)
где
![]() — добротность системы по ускорению
(1/c2).
— добротность системы по ускорению
(1/c2).
Из выражений для коэффициентов ошибки видно, что увеличение коэффициента усиления разомкнутой системы и повышения порядка астатизма привадит к уменьшению коэффициентов ошибки или к исчезновению некоторых коэффициентов ошибки, а следовательно, к повышению точности работы системы в установившемся режиме. Это позволяет выбрать коэффициент усиления разомкнутой системы (порядок астатизма системы) таким образом, чтобы обеспечить заданную точность. Однако увеличение коэффициента усиления и повышение порядка астатизма влияет на устойчивость системы.