

Применение преобразования Лапласа для решения линейных дифференциальных уравнений.
Линейные дифференциальные уравнения динамических систем решаются методами, которые подробно рассматриваются в курсах высшей математики. Для задач ТАУ наиболее удобным является операционный метод решения, основанный на функциональном преобразовании Лапласа
![]() .
.
Эта функция устанавливает соответствие между функцией времени х(t) (вещественной переменной) и функцией Х(s) (комплексной переменной s=c+jω). Здесь х(t) – оригинал, Х(s) – изображение. Символически эта операция записывается так:
Х(s)
=
![]() .
.
Чтобы вернуться от изображения к оригиналу, нужно выполнить обратное преобразование Лапласа по формуле:
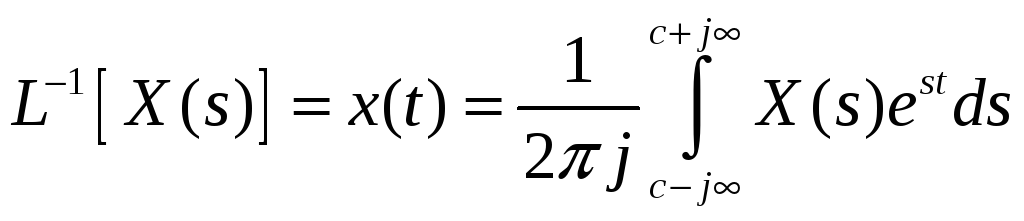 .
.
Символ L указывает на то, что над функцией х(t) совершено преобразование Лапласа. На практике, чтобы не вычислять интегралы, для нахождения изображения по известному оригиналу или наоборот, используют специальные таблицы. Ниже приведено преобразование Лапласа для основных функций, которые наиболее часто встречаются при анализе систем автоматического управления.
Таблица преобразований Лапласа
|
х(t) (t > 0) |
Х(s) = L[х(t)] |
|
1(t) |
1/s |
|
δ(t) |
1 |
|
t |
1/s2 |
|
tn |
n!/sn+1 |
|
eat |
1/(s – a) |
|
e-at |
1/(s + a) |
|
t·eat |
1/(s – a)2 |
|
tn·eat |
n!/(s – a)n+1 |
|
sin(ωt) |
ω/(s2 + ω2) |
|
cos(ωt) |
s/(s2 + ω2) |
|
sin(ωt + φ) |
[sin(φ) ·s + cos(φ) ·ω]/(s2 + ω2) |
|
cos(ωt + φ) |
[cos(φ) ·s – sin(φ) ·ω]/(s2 + ω2) |
|
eat·sin(ωt) |
ω/[(s – a)2 + ω2] |
|
eat·cos(ωt) |
(s – a)/[(s – a)2 + ω2] |
|
eat·sin(ωt + φ) |
[sin(φ) ·(s – a) + cos(φ) ·ω]/[(s – a)2 + ω2] |
|
eat·cos(ωt + φ) |
[cos(φ) ·(s – a) – sin(φ) ·ω]/[(s – a)2 + ω2] |
(n! – выражение факториала, оно равно: n! = 1·2·3·4·…· (n – 1) ·n).
Особо следует отметить, что вид оригинала функций, приведенных в таблице, определен только для t > 0, т.е. значения переменной t ограничены областью положительных значений. Для отрицательных t значение функции х(t) равно нулю. Это важно, и игнорирование этого факта может на практике привести к существенным ошибкам.
Рассмотрев преобразование Лапласа, дадим определение передаточной функции звена САУ.
Передаточной функцией звена W(s) называется отношение изображений Лапласа выходной и входной величин при нулевых начальных условиях, т.е.
![]() . (2.4)
. (2.4)
Для рассмотренного выше примера (выражение 2.3) передаточная функция W(s) будет отличаться от W(р) только заменой оператора дифференцирования р на комплексную переменную s и будет выглядеть следующим образом:
![]() . (2.5)
. (2.5)