

-
Разработка схемы электрической принципиальной.
Управление двигателем постоянного тока.
Двигатели постоянного тока являются одними из самых распространенных устройств в промышленных, бытовых и игровых роботах, транспортном оборудовании и в системах автоуправления.
Эти электрические машины имеют ряд серьезных достоинств по сравнению с двигателями переменного тока:
-
Большой диапазон мощности двигателя;
-
Возможность плавного регулирования скорости вращения ротора.
Управление скоростью вращения часто осуществляется с помощью ШИМ, а реверсирование двигателя – изменением полярности питания обмотки якоря.
Основной задачей при разработке системы управления ДПТ является разработка схемы подключения двигателя к устройству сопряжения – драйвера двигателя.
Рассмотрим несколько вариантов драйверов двигателей постоянного тока.
-
H-мост.
В качестве ключей А1А2, В1В2
в зависимости от требований, предъявляемых
СУ и мощности двигателя, могут быть
использованы:
качестве ключей А1А2, В1В2
в зависимости от требований, предъявляемых
СУ и мощности двигателя, могут быть
использованы:
-
Двухконтактные электромагнитные реле – если не предъявляются требования к высокой точности момента включения двигателя.
-
Ключи АА, ВВ представляют собой электронные транзисторные ключи с использованием коллектора – значительно повышает быстродействие.
-
Теристорные преобразователи.
-
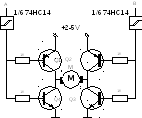
Четырехтранзисторный мост.
Схема управления состоит из 4-транзисторного моста (пара p-n-p транзисторов и пара n-p-n транзисторов). В базы всех транзисторов включены выходные цепи двух триггеров Шмидта, а входные цепи этих триггеров подключаются к выходным цепям устройства сопряжения, что обеспечивает совместимость управляющих сигналов с топологией ТТЛ. При подаче на вход А логической 1, а на вход В – логического 0, ротор двигателя вращается в одном направлении. Если А=0, В=1, вращение происходит в другом направлении. Мощность нагрузки (Рдвигателя) зависит от выбранных транзисторов. Так, например, если выбрать для транзисторов Q1, Q2 транзистор КТ686В, а для Q3, Q4 – КТ682А, то можно будет использовать двигатель с номинальным током до 360 мА.
-
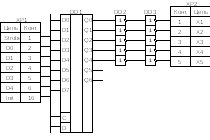
У
 правление
шаговым двигателем с помощь специальных
микросхем L293.
правление
шаговым двигателем с помощь специальных
микросхем L293.
 Особенностью
управляющей микросхемы является то,
что она имеет два раздельные цепи питания
для электрической части (Vcc1) и двигателей
(Vcc2). Входы А1 и А2 задают направление
вращения: если А1=1, А2=0 – вращение в одну
сторону, иначе – в другую. Вход EN управляет
работой моста, с его помощью можно
включить или выключить мост, либо, подав
на него широтно-модулированный сигнал,
управлять скоростью вращения.
Особенностью
управляющей микросхемы является то,
что она имеет два раздельные цепи питания
для электрической части (Vcc1) и двигателей
(Vcc2). Входы А1 и А2 задают направление
вращения: если А1=1, А2=0 – вращение в одну
сторону, иначе – в другую. Вход EN управляет
работой моста, с его помощью можно
включить или выключить мост, либо, подав
на него широтно-модулированный сигнал,
управлять скоростью вращения.
Широтно-модулированный сигнал позволяет за счет изменения скважности пульсирующего напряжения изменять действующее значение тока. В этом случае за счет изменения скважности между паузой и импульсом в цепи питания можно изменить действующее значение тока питания якоря и, следовательно, изменить скорость вращения ротора.
-
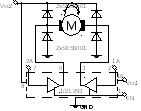
Двухканальная система управления двигателем постоянного тока LB1836M.
 Схема
предназначена для управления одновременно
двумя двигателями за счет двухканальной
структуры. Предусмотрено раздельное
питание цепей электроники, а также
питание двигателей М1 и М2. Ее отличие –
малые размеры при большом токе нагрузки
со встроенными защитными диодами.
Схема
предназначена для управления одновременно
двумя двигателями за счет двухканальной
структуры. Предусмотрено раздельное
питание цепей электроники, а также
питание двигателей М1 и М2. Ее отличие –
малые размеры при большом токе нагрузки
со встроенными защитными диодами.
Напряжение питание выходного каскада 1,9‑9 В.
Напряжение питания и схема узлов 2,5 – 9 В.
Максимальный ток нагрузки 1 А.
Управление каскадами осуществляется входными цепями F1-R1, F2-R2.
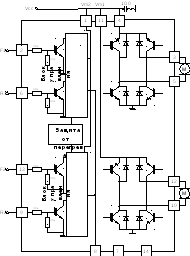
Схема управления роботами.
Рассмотрим несколько структурных схем систем управления РТК в комплексе.
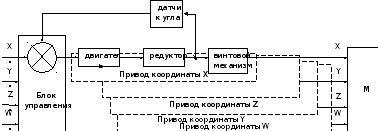
М – манипулятор, т.е. исполнительный механизм робота, каждый исполнительный механизм осуществляет перемещение по одной из степеней свободы, ему предоставленной.
Приводом по каждой степени свободы являются 3 компонента:
-
Двигатель постоянного тока;
-
Редуктор для уменьшения скорости вращения и увеличения мощности на валу;
-
Винтовой механизм – элемент кинематической схемы, обеспечивающий перемещение по заданной траектории. В данном случае из вращательного в поступательное.
В качестве образования связи по величине перемещения используется датчик угла поворота вала редуктора и винта.
Блок управления представляет собой драйверы двигателей по всем координатам и устройства сопряжения драйвера двигателя управляющего ЭВМ.