

2.4 Построение плана скоростей
Скорость точки А определяем по формуле
![]()
Вектор
скорости направлен перпендикулярно
звену
![]() в
сторону, соответствующую направлению
угловой скорости
в
сторону, соответствующую направлению
угловой скорости
![]() .
.
На
плане скоростей скорость точки
![]() изображается отрезком
изображается отрезком
![]() .
.
Масштабный коэффициент плана скоростей
![]()
Скорость точки В определяем из системы уравнений
Решаем графически систему уравнений . Для этого из точки а проводим прямую, перпендикулярную к звену АВ, а с точки рv, проводим прямую перпендикулярно звену ВL. В месте пересечения получаем точку b.
Скорости равны
![]()
Положение точек С и D определяем с соотношения
Скорость точек С и D равна
![]()
Скорость точки C5 определяем из уравнения
![]()
Уравнение решаем графически. Для этого из точки с3 проводим вектор, параллельно звену LD. Из полюса проводим линию, параллельную движению ползуна и в точке пересечения находим точку с5.
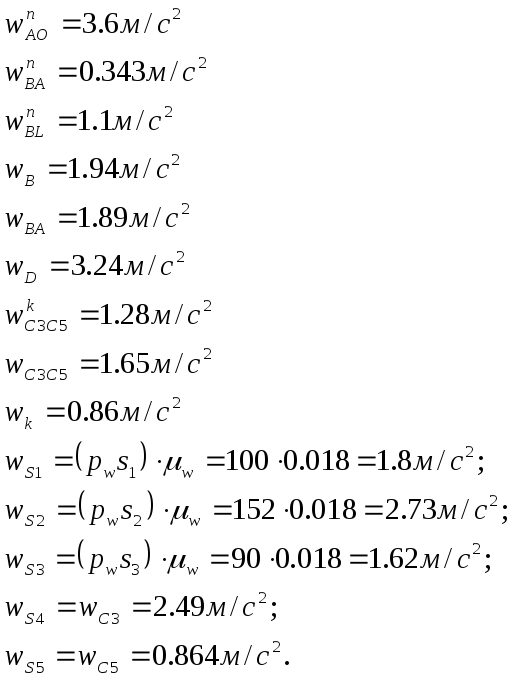
Скорости равны

Угловые скорости равны
Положение центра масс звеньев находится на их середине.
Скорости равны.
2.5 Построение плана ускорений
Ускорение точки А определяем с уравнения
![]()
где w0 – ускорение точки О=0, так как она неподвижна;
![]() нормальное
ускорение точки А. Его величина
нормальное
ускорение точки А. Его величина
![]()
![]() тангенциальное
ускорение точки А=0, так как ε1=0.
тангенциальное
ускорение точки А=0, так как ε1=0.
Выбираем положение точки Рw – полюс и проводим вектор нормального ускорения точки А.
Масштабный коэффициент плана ускорений:
![]()
Ускорение точки В определяем с системы уравнений
Определяем значения нормальных ускорений
![]()
Определяем длину векторов нормальных ускорений
Графически решаем данную систему. Для этого из точки а проводим вектор нормального ускорения параллельно звену ВА. Из точки рw проводим вектор нормального ускорения параллельно звену ВL. С концов нормальных ускорений проводим тангенциальные ускорения перпендикулярно нормальным и в точке пересечения получаем точку b и определяем ускорения
![]()
Положение точек С и D определяем с соотношения
Ускорение точек равно

Ускорение точки С5 определяем из уравнения
![]()
Определяем величину кориолисово ускорения
![]()
Определяем длину вектора ускорения
![]()
Уравнение решаем графически. Для этого из точки с3 проводим вектор кориолисового ускорения. С точки К проводим перпендикуляр до пересечения с горизонталью, которая проведена из полюса.
Ускорения равны
Положение центра масс звеньев находится по середин центра масс.
Ускорения равны.
Положение центра масс звеньев находится по середин центра масс.
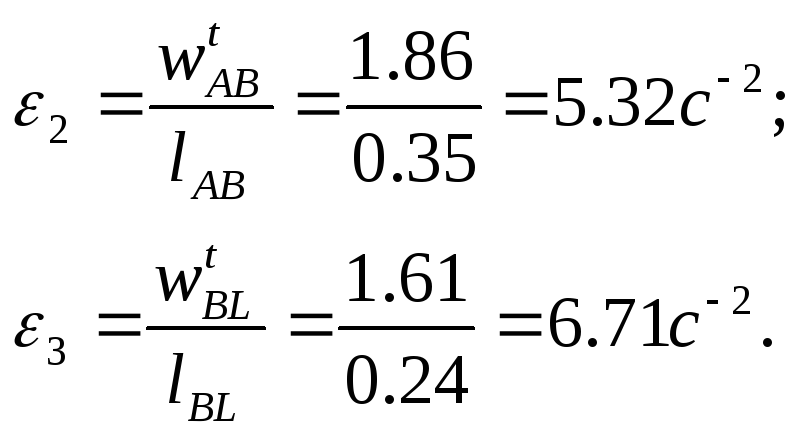
Определяем тангенциальные ускорение:

Угловые ускорения
3 Силовой анализ
Для начала составим расчётную модель для проведения силового анализа, которая представляет собой кинематическую схему механизма
Массы планок равны
![]()
Вектор
силы тяжести
![]() выходит из точки центра масс звена
выходит из точки центра масс звена
![]() и направляется вертикально вниз.
и направляется вертикально вниз.
Далее
рассчитаем величины сил инерции
![]() по следующей формуле:
по следующей формуле:
![]() ,
,
где![]() – ускорение
центра масс звена, которое определяется
на плане ускорений механизма.
– ускорение
центра масс звена, которое определяется
на плане ускорений механизма.
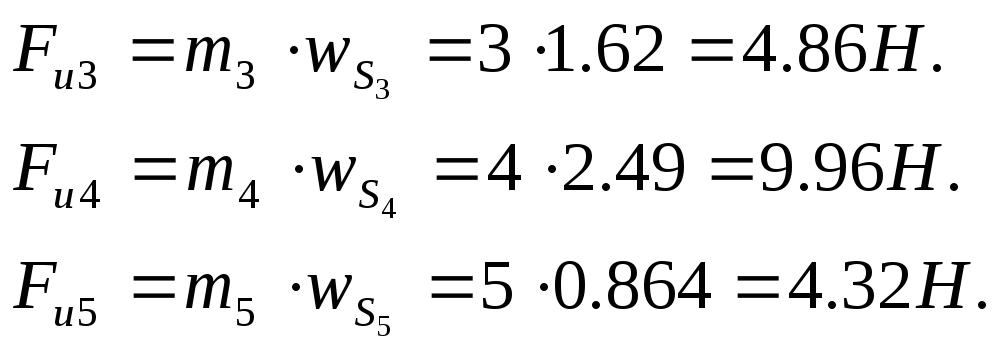
Подставляя найденные значения ускорений центров масс в формулу для определения силы инерции, получаем:
![]()
![]()
Вектор
силы инерции
![]() выходит из точки
выходит из точки
![]() и направляется в противоположную сторону
вектору ускорения центра масс звеньев
и направляется в противоположную сторону
вектору ускорения центра масс звеньев
![]() ,
т.е.
,
т.е.
![]() .
.
Далее
рассчитаем моменты пар сил инерции
![]() звеньев. Данный силовой фактор направлен
в противоположную сторону угловому
ускорению звена (
звеньев. Данный силовой фактор направлен
в противоположную сторону угловому
ускорению звена (![]() )
и определяется по следующей зависимости:
)
и определяется по следующей зависимости:
![]() ,
,
где
![]() – момент
инерции звена относительно оси, проходящей
через центр масс;
– момент
инерции звена относительно оси, проходящей
через центр масс;
![]() – угловое
ускорение звена.
– угловое
ускорение звена.
Момент инерции ведомых линейных звеньев определяем по формуле:
![]()
Тогда моменты инерции и моменты пары сил инерции для звеньев в исследуемом плоском рычажном механизме будут равны:
![]()
![]()
![]()
Вначале
выделяем из состава схемы группы звеньев.
Исследуемый механизм состоит из трех
групп: первичный механизм 0-1, структурная
группа звеньев 2-3 и структурная группа
звеньев 4-5 (см. структурный анализ).
Каждую группу вычерчивают отдельно в
произвольном масштабном коэффициенте
длин
![]() ,
начиная с той, в которую входит выходное
звено. Далее с расчётной модели переносят
все силы, действующие на звенья группы,
а отброшенные связи с другими звеньями
механизма заменяют реакциями. Во
вращательной паре отброшенная связь
заменяется реакцией, которая раскладывается
на две составляющие:
,
начиная с той, в которую входит выходное
звено. Далее с расчётной модели переносят
все силы, действующие на звенья группы,
а отброшенные связи с другими звеньями
механизма заменяют реакциями. Во
вращательной паре отброшенная связь
заменяется реакцией, которая раскладывается
на две составляющие:
![]() и
и
![]() нормальная
и тангенциальная реакции соответственно.
Вектор
нормальная
и тангенциальная реакции соответственно.
Вектор
![]() всегда направлен вдоль оси звена
(параллельно), а вектор
всегда направлен вдоль оси звена
(параллельно), а вектор
![]()
перпендикулярно оси звена.
перпендикулярно оси звена.
Рассмотрим структурную группу 4-5. К данной группе приложены сила инерции и массы звеньев. Также приложена сила сопротивления. Которая равна
![]()
Запишем уравнение равновесия суммы всех сил по группе 4-5
![]()
Равенство нулю векторной суммы означает, что многоугольник сил является замкнутым.
Принимаем масштабный коэффициент F = 127 Н/мм и определяем длинны векторов реакций
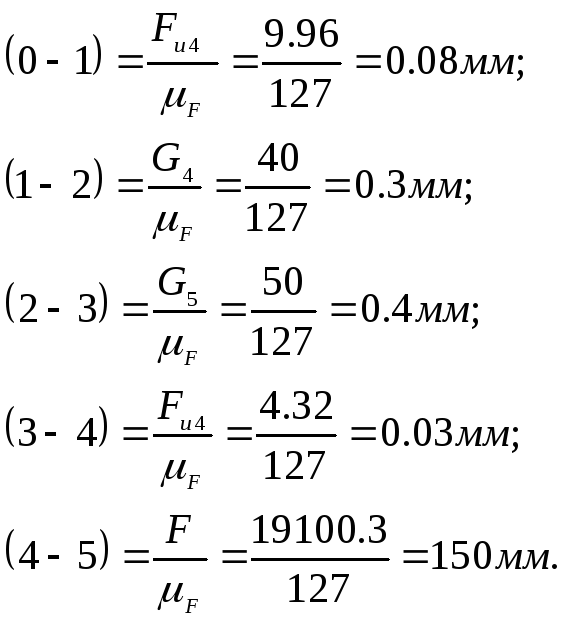
Переходим
к построению векторного многоугольника
сил. На чистом месте строим линию, на
которой лежит вектор
![]() (перпендикулярно оси коромысла). Так
как размер вектора нам пока неизвестен,
то произвольно на данной прямой ставим
точку и уславливаемся, что она будет
являться вершиной искомого вектора
(перпендикулярно оси коромысла). Так
как размер вектора нам пока неизвестен,
то произвольно на данной прямой ставим
точку и уславливаемся, что она будет
являться вершиной искомого вектора
![]() .
Далее в сумме идут вектора известных
сил по величине и направлению, поэтому
их по порядку строим. При этом каждый
последующий в сумме вектор строится из
вершины предшествующего. При длине
вектора меньше 1 мм его не оказываем на
чертеже. Построив вектор
.
Далее в сумме идут вектора известных
сил по величине и направлению, поэтому
их по порядку строим. При этом каждый
последующий в сумме вектор строится из
вершины предшествующего. При длине
вектора меньше 1 мм его не оказываем на
чертеже. Построив вектор
![]() ,
из его вершины, строим линию действия
неизвестной реакции
,
из его вершины, строим линию действия
неизвестной реакции
![]() и
и
![]() .
.
Найдём
величины искомых реакций, замерив их
на многоугольнике и умножив на
![]() :
:
![]()
Вычертим
отдельно структурную группу 2-3 и
показываем все силы, действующие на
звенья данной группы. Отброшенные связи
шатуна с кривошипом и коромысла со
стойкой, по принципу освобождаемости
от связей, заменим реакциями
![]() и
и
![]() соответственно. В данной структурной
группе имеется четыре неизвестных
соответственно. В данной структурной
группе имеется четыре неизвестных
![]() и
и
![]() ,
значит система трижды статически
неопределима.
,
значит система трижды статически
неопределима.
В
первую очередь определяем тангенциальные
реакции, составляя уравнения равновесия
![]() .
.
Для
определения величины
![]() рассмотрим отдельно второе звено и
составим для него уравнение равновесия,
получим:
рассмотрим отдельно второе звено и
составим для него уравнение равновесия,
получим:
![]()
![]()
Тогда
![]() будет равна:
будет равна:
![]() Знак
плюс в полученном значении означает,
что взятое ранее направление вектора
реакции
Знак
плюс в полученном значении означает,
что взятое ранее направление вектора
реакции
![]() выбрано нами верно.
выбрано нами верно.
Для
определения величины
![]() рассмотрим отдельно кулису и составим
для него уравнение равновесия, получим:
рассмотрим отдельно кулису и составим
для него уравнение равновесия, получим:
![]()
![]()
Тогда
![]() будет равна:
будет равна:

Знак
плюс в полученном значении означает,
что взятое ранее направление вектора
реакции
![]() выбрано нами верно.
выбрано нами верно.
В
структурной группе 2-3 осталось две
неизвестных силы (![]() ),
их можно определить построением
векторного многоугольника сил. Составляем
уравнение равновесия
),
их можно определить построением
векторного многоугольника сил. Составляем
уравнение равновесия
![]() ,
по которому будем строить многоугольник.
,
по которому будем строить многоугольник.
Тогда для СГ 2-3 будем иметь:
![]() .
.
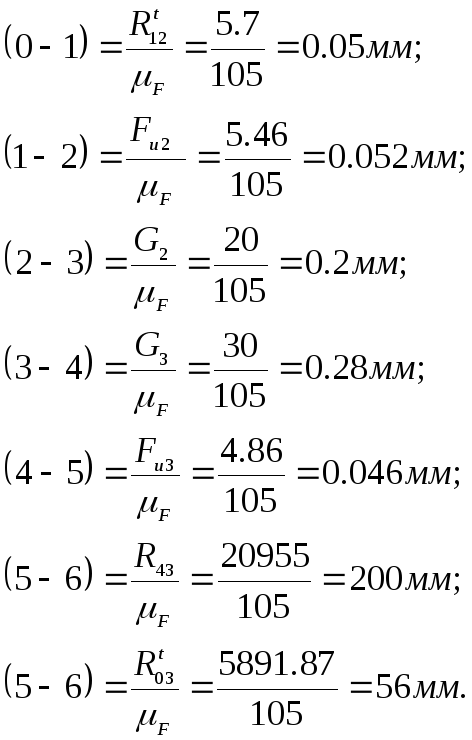
Равенство нулю векторной суммы означает, что многоугольник сил является замкнутым.
Принимаем масштабный коэффициент F = 105 Н/мм и определяем длинны векторов реакций
Переходим
к построению векторного многоугольника
сил. На чистом месте строим линию, на
которой лежит вектор
![]() (параллельно оси шатуна). Так как размер
вектора нам пока неизвестен, то произвольно
на данной прямой ставим точку и
уславливаемся, что она будет являться
вершиной искомого вектора
(параллельно оси шатуна). Так как размер
вектора нам пока неизвестен, то произвольно
на данной прямой ставим точку и
уславливаемся, что она будет являться
вершиной искомого вектора
![]() .
Далее в сумме идут вектора известных
сил по величине и направлению, поэтому
их по порядку строим. При этом каждый
последующий в сумме вектор строится из
вершины предшествующего. Поострив
вектор
.
Далее в сумме идут вектора известных
сил по величине и направлению, поэтому
их по порядку строим. При этом каждый
последующий в сумме вектор строится из
вершины предшествующего. Поострив
вектор
![]() ,
из его вершины, строим линию действия
неизвестной реакции
,
из его вершины, строим линию действия
неизвестной реакции
![]() (параллельно оси коромысла). При этом
линии действия векторов
(параллельно оси коромысла). При этом
линии действия векторов
![]() и
и
![]() пересекаются, замыкая многоугольник
сил и определяя действительные направления
данных векторов и их модули.
пересекаются, замыкая многоугольник
сил и определяя действительные направления
данных векторов и их модули.
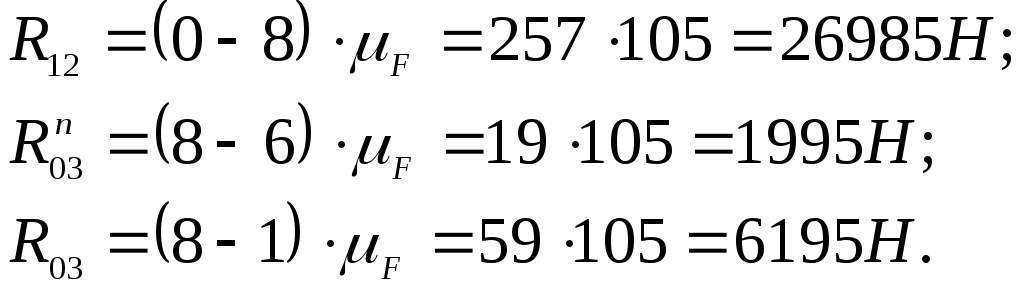
Найдём
величины искомых реакций, замерив их
на многоугольнике и умножив на
![]() :
:
Вычертим
следующую группу звеньев (первичный
механизм 0-1). Покажем все силы, действующие
на звенья данной группы. Отброшенную
связь кривошипа с шатуном заменим
реакцией
![]() ,
которая по модулю равна
,
которая по модулю равна
![]() ,
но в противоположную сторону направлена,
т.е.
,
но в противоположную сторону направлена,
т.е.
![]() .
Следовательно, из предшествующего
многоугольника сил берём вектор
.
Следовательно, из предшествующего
многоугольника сил берём вектор
![]() ,
переносим его в точку A на кривошипе и
в противоположную сторону направляем
, тем самым найдём направление реакции
,
переносим его в точку A на кривошипе и
в противоположную сторону направляем
, тем самым найдём направление реакции
![]() .
.
Определим уравновешивающий момент
![]()
![]() В
первичном механизме осталась одна
неизвестная реакция
В
первичном механизме осталась одна
неизвестная реакция
![]() .
Чтобы её найти построим векторный
многоугольник сил.
.
Чтобы её найти построим векторный
многоугольник сил.
Запишем уравнения равновесия всех сил по группе
![]()
Принимаем масштабный коэффициент F =180 Н/мм и определяем длинны векторов реакций
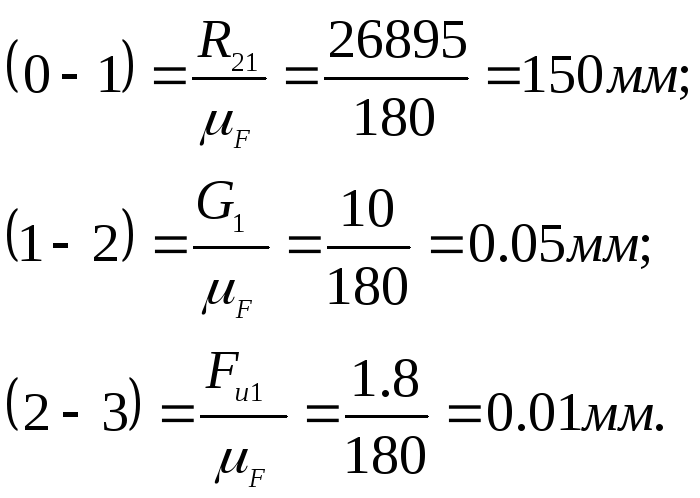
Найдём
величину искомой реакций, замерив ее
на многоугольнике и умножив на
![]() :
:
![]()