

7 Синтез неадаптивного и адаптивного законов управления
7.1 Синтез неадаптивного закона управления
Рассматривается объект управления следующего вида:
![]()
при
следующих граничных (угловых) значениях:
![]()
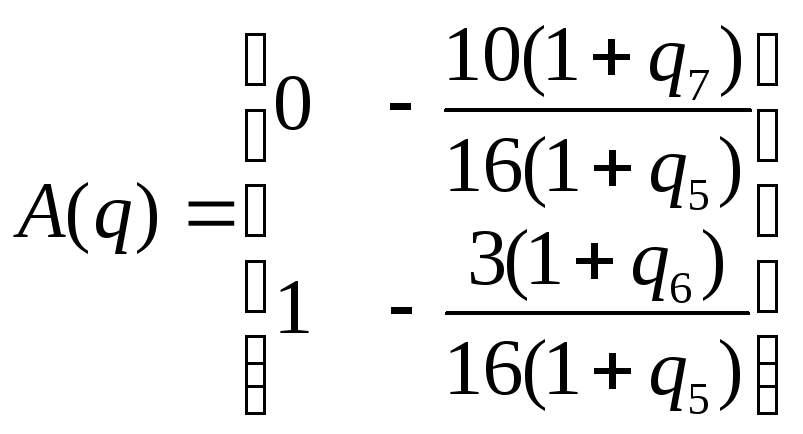
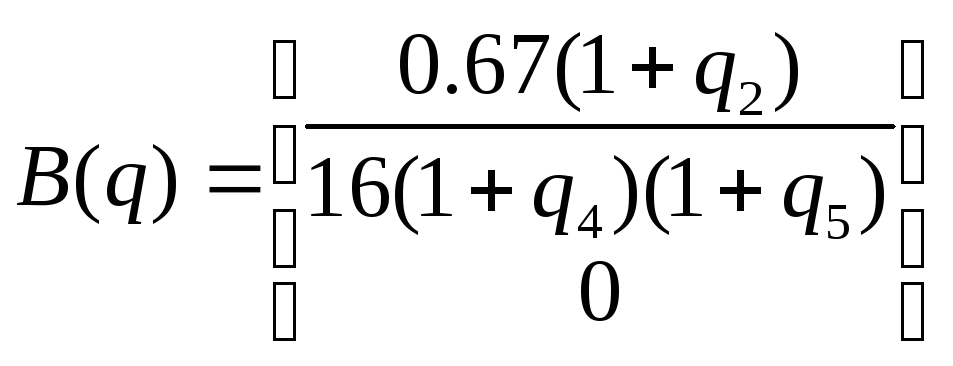
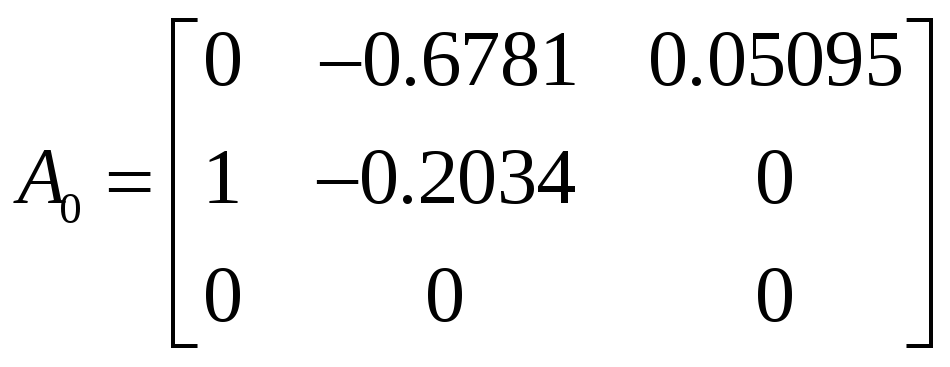
В пункте 1 было получено представление НОУ в виде ВСВ:
![]()
 ,
,
 ,
,
![]() .
.
Для
простоты ограничимся обеспечением
инвариантности относительно
неопределенности одного из параметров,
например, параметра
![]() .
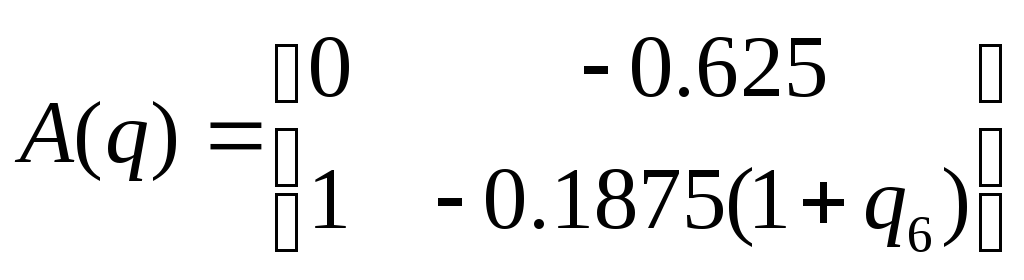
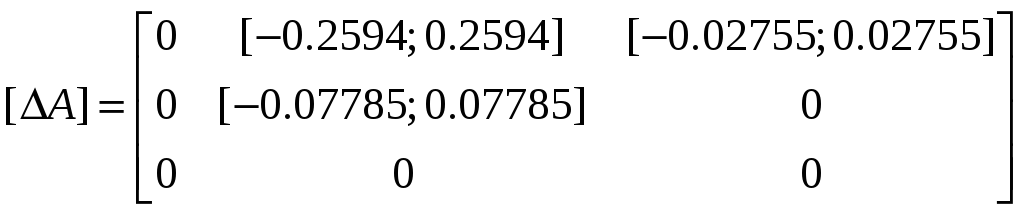
Тогда имеем следующее описание:
.
Тогда имеем следующее описание:
 ,
,
![]() ,
,
![]() .
.
Тогда
![]()

Введём
разложение
![]() ,
в этом случае получаем:
,
в этом случае получаем:
![]()
Назначим желаемые корни эталонной модели:
Пусть
![]() .
.
Тогда
используем закон управления
![]() ,
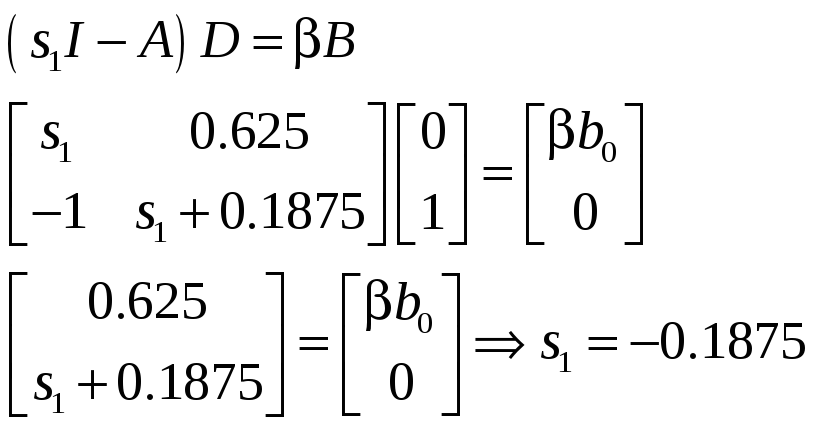
а для нахождения матрицы К используются
следующие формулы:
,
а для нахождения матрицы К используются
следующие формулы:
![]()
![]()

Разрешая вышеприведенные уравнения, получаем:
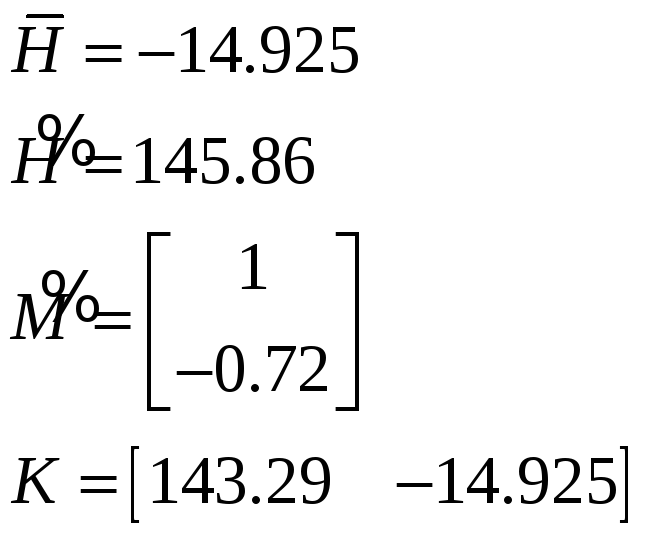
Найдем матрицу прямых связей по задающему воздействию:
![]()
Реализационная версия закона управления имеет вид:
![]()
7.2 Синтез адаптивного закона управления
Рассматривается объект управления следующего вида:
![]()
где
![]() :
:
 ,
,
 ,
,
![]()
Введем эталонную модель:
![]()
Выберем желаемый полином Баттерворта следующим образом:
![]()
Матрица
![]() составляется, исходя из требуемого
распределения мод:
составляется, исходя из требуемого
распределения мод:
![]() ,
, ![]() ;
;
![]() ,
,
![]()
 .
.
Для
обеспечения единичного коэффициента
передачи примем
 .
.
Закон управления определяется выражением:
![]()
Алгоритм адаптации имеет вид:
где
![]() ,
,
![]() ,
,
![]() ,
а матрица Р определяется из уравнения:
,
а матрица Р определяется из уравнения:
![]() ,
где Q
– произвольная симметрическая
положительно определенная матрица.
,
где Q
– произвольная симметрическая
положительно определенная матрица.
Найдем матрицу P:
Тогда
![]()
Пусть
![]() .
.
В итоге имеем следующее управление:
![]()
Схема моделирования представлена на рисунке 12, переходные процессы – на рисунке 13.
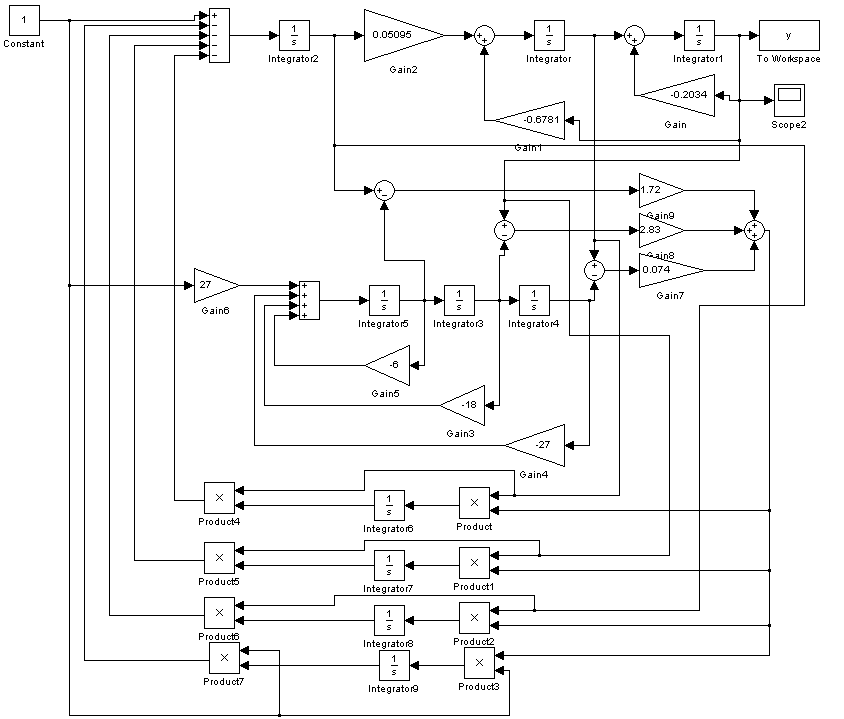
Рисунок 12 – Схема моделирования системы с адаптивным регулятором
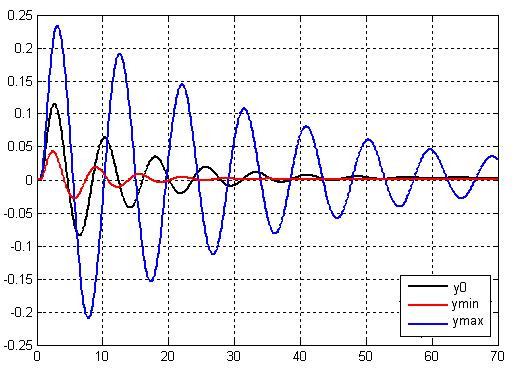
Рисунок 13 – Переходная характеристика системы с адаптивным регулятором для медианного, максимального и минимального набора параметров