

лабораторная работа / отчет по лабораторной 3
.docМинистерство образования Российской Федерации
Уфимский Государственный Авиационный Технический Университет
Кафедра ТК
Отчет по лабораторной работе №3
Коррекция статических и динамических свойств САУ
Вариант №7
Выполнил:
Проверила:
Уфа – 2005
1. Цель работы
Эта работа нацелена на приобретение студентами навыков анализа и синтеза САУ :
1) определение характеристик САУ, которые необходимо скорректировать;
2) обеспечение точности (уменьшение статической ошибки) САУ;
3) выбор значений параметров регулятора, обеспечивающих желаемые динамические свойства САУ;
4) подтверждение (путем моделирования) того, что в результате введения корректирующего устройства (регулятора) САУ приобрела желаемые свойства.
2. Выполнение работы
|
№ варианта Параметры |
7 |
|
a |
3,5 |
|
K0 |
7 |
|
T, c |
0,9 |
|
ξ |
0,5 |
|
|
0 |
|
tрег , c ≤ |
4,0 |
|
|
0 |
Исследование на устойчивость линейных САУ.
1) При исследовании способов
коррекции статических свойств САУ в
качестве исходных данных выступают
передаточная функция
![]() неизменяемой части системы вида
неизменяемой части системы вида
![]() и
задающие воздействия
и
задающие воздействия

Путем моделирования на РС исходной
САУ получить графики
![]()
а)![]()
g(t) e(t)
e(t)
 y(t)
y(t)
![]()
![]() (2)
(2)
Величины
![]() называются коэффициентами ошибок и
определяются по формулам:
называются коэффициентами ошибок и
определяются по формулам:
![]() (3)
(3)
где
![]() -
передаточная функция САУ по ошибке
управления, равная
-
передаточная функция САУ по ошибке
управления, равная
![]() (4)
(4)
![]() - передаточная функция разомкнутой САУ.
- передаточная функция разомкнутой САУ.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() при
при
![]()
Полученная экспериментальная величина
![]() совпадает с теоретической.
совпадает с теоретической.
б)![]() .
.
g(t) e(t)
e(t)
 y(t)
y(t)
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Экспериментальная величина
![]() совпадает с теоретической.
совпадает с теоретической.
3) применяя описанные в
теоретической части методических
указаний способы коррекции статических
свойств, обеспечить требуемую статическую
ошибку
![]() системы при отработке задающего
воздействия:
системы при отработке задающего
воздействия:
a)
![]()
- увеличение коэффициента усиления прямого тракта системы K=2 (Kобщ=10)
e(t)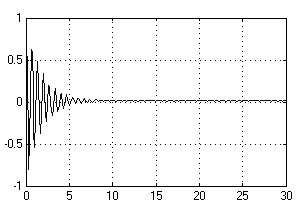 y(t)
y(t)
Увеличив коэффициент усиления прямого
тракта системы, получили требуемую
статическую ошибку εуст=0,01
при отработке задающего воздействия
![]() .
.
- введение в прямой тракт системы интегрирующих звеньев
При введении интегратора система
становится неустойчивой. Для приведения
ее к устойчивости установим коэффициент
передаточной функции
![]() К0=1.
К0=1.
e(t) y(t)
y(t)
При введении интегрирующих звеньев
система имеет нулевую статическую
ошибку при отработке постоянного
задающего воздействия
![]() .
.
- охват объекта управления местной неединичной положительной обратной связью
e(t) y(t)
y(t)
При охвате местной неединичной
положительной обратной связью система
имеет нулевую статическую ошибку при
отработке постоянного задающего
воздействия
![]() .
.
б)
![]()
- увеличение коэффициента усиления прямого тракта системы K=2 (Kобщ=10)
e(t) y(t)
y(t)
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
- введение в прямой тракт системы интегрирующих звеньев
e(t) y(t)
y(t)
Система имеет постоянную ошибку
![]() =3,5
при отработке линейно изменяющегося
воздействия
=3,5
при отработке линейно изменяющегося
воздействия
![]()
![]() .
.
- охват объекта управления местной неединичной положительной обратной связью
e(t) y(t)
y(t)
Система имеет постоянную ошибку
![]()
![]()
При охвате местной неединичной положительной обратной связью статическая ошибка уменьшается.
2. При исследовании рассмотренного
способа коррекции динамических свойств
САУ (см. п. 2.2) в качестве исходных
данных выступают передаточная функция
![]() неизменяемой части системы вида
(3.15) и передаточная функция регулятора
вида
неизменяемой части системы вида
(3.15) и передаточная функция регулятора
вида ![]()
Задающее воздействие
![]() .
.

Получить путем моделирования на РС
графики
![]() ,
,
![]() в системе:
в системе:
e(t) y(t)
y(t)
![]()
![]() ,
,
![]()
|
|
Запас
устойчивости по фазе
запас
устойчивости по модулю
|

Применяя описанный выше
способ коррекции динамических свойств
САУ, найти экспериментально (путем
последовательного перебора) значение
![]() ,
обеспечивающее в системе заданные
преподавателем показатели качества
(
,
обеспечивающее в системе заданные
преподавателем показатели качества
(![]() ,
,![]() )
)![]() и
запасы устойчивости (при необходимости
увеличить коэффи- циент
и
запасы устойчивости (при необходимости
увеличить коэффи- циент![]() );
);
Получить графики
![]() ,
,
![]() ,
а также ЛАХ и ЛФХ разомкнутой системы
в скорректированной САУ.
,
а также ЛАХ и ЛФХ разомкнутой системы
в скорректированной САУ.
e(t) y(t)
y(t)
![]()
![]()
![]()
![]()
|
|
Запас
устойчивости по фазе
запас
устойчивости по модулю
|

3. Выводы
В лабораторной работе проводилась коррекция статических свойств САУ: проводилось уменьшение статической ошибки; динамических свойств САУ: в результате введения корректирующего устройства (регулятора) обеспечивались желаемые динамические свойства САУ.