

лабораторная работа / Отчет по ЛР№3
.docМинистерство образования Министерство образования и науки
УНИВЕРСИТЕТ Кафедра "Электропривод и АПУ"
лабораторная работа N3
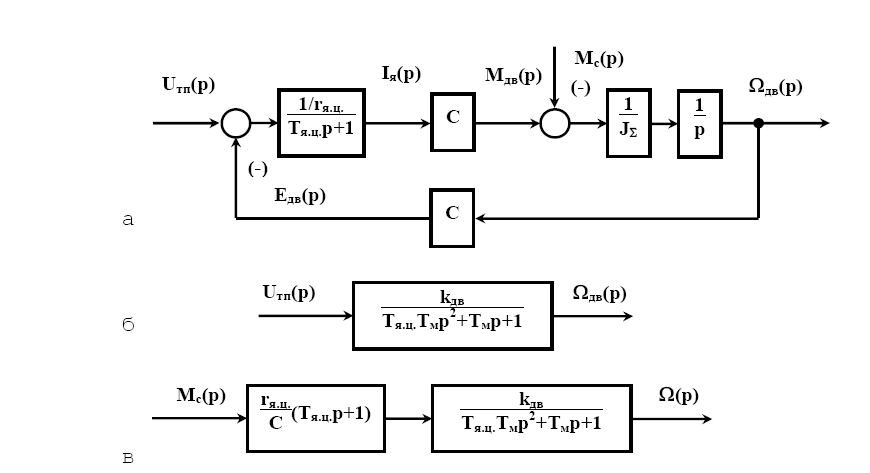
Определение передаточных функций
системы автоматического регулирования
Вариант
Выполнил:Студент гр. ФИО.
Проверила:ФИО
г. город 2008
Цель работы: Вывод передаточных функций двигателя постоянного тока и построение его статических характеристик.
Ход работы:
C е— конструктивная постоянная двигателя; коэффициент пропорциональности, равный моменту вращения якоря при единичном значении тока якоря и измеряемый в Н⋅м/А.
Коэффициент 1/См[рад/В⋅с] показывает, на сколько изменяется скорость вращения двигателя при изменении управляющего напряжения на одну единицу.
Исходные данные:
|
Uном |
220 В |
|
wном |
157 рад/с |
|
Pном |
4,5 кВт |
|
Iном |
25,3 А |
|
Rя |
0,69 Ом |
|
Lя |
8,3 мГн |
|
С |
1,27 В*с/рад |
|
Jд |
0,045 кг*м2 |
|
Rв |
172 Ом |
|
Lв |
15,2 Гн |
|
Фвном |
5,67 мВб |
Текст программы:
> restart;
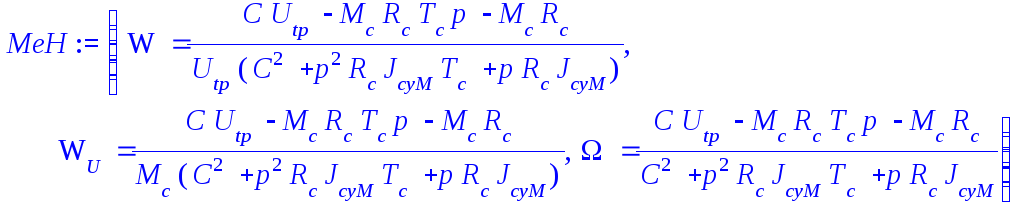
MeH:=solve({((U[tp]-Omega*C)*(C/R[c])/(T[c]*p+1)-M[c])*(1/J[cyM])=Omega*p,W=Omega/U[tp],W[U]=Omega/M[c]}, {Omega,W,W[U]});
> W[1]:=normal(eval(subs(MeH,W)));

> W[2]:=eval(collect( W[1],p),[M[c]=0]);
![]()
> Okl:=numer(W[2]);
![]()
> K[1]:=C^2;
![]()
> K[gB]:=Okl/K[1];
![]()
> Zn:=denom(W[2]);
![]()
> K[2]:=C^2;
![]()
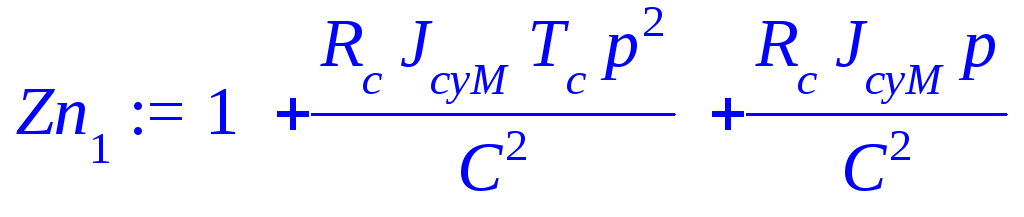
> Zn[1]:=collect((C^2+p^2*R[c]*J[cyM]*T[c]+p*R[c]*J[cyM])/K[2],p);
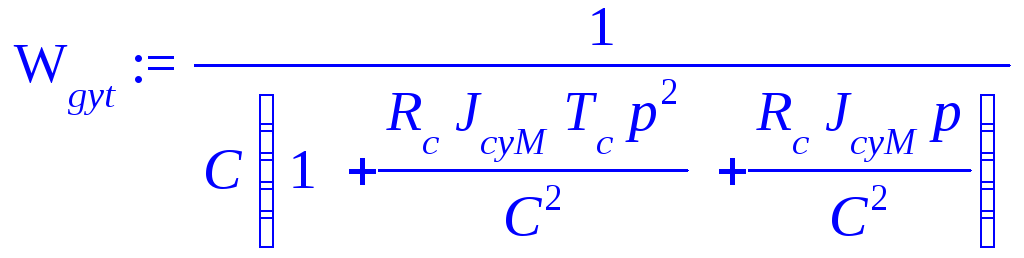
> W[gyt]:=K[gB]/Zn[1];
> W[3]:=subs( MeH, W[U] );

> W[4]:=simplify(eval(collect( W[3],p),[U[tp]=0]));
> Ok:=numer(W[4]);
![]()
> Ok[gyt]:=(-R[c]*(T[c]*p+1))/K[1];
![]()
> Ok[sehrgut]:=collect(Ok[gyt],p);
![]()
> W[gyt]:=(-R[c]*T[c]/C^2*p-R[c]/C^2)/(1+R[c]*J[cyM]*T[c]/C^2*p^2+R[c]*J[cyM]/C^2*p);
>
> omega:=U[tp]/C-R[c]/(C^2)*M[c];
![]()
> omega1:=eval(omega,[C=1.27,R[c]=0.69,U[tp]=220]);
![]()
> omega2:=eval(omega,[C=1.27,R[c]=0.69,U[tp]=150]);
![]()
> omega3:=eval(omega,[C=1.27,R[c]=0.69,U[tp]=100]);
![]()
> plot([omega1(M[c]),omega2(M[c]),omega3(M[c])], M[c]=0..400,0..200);

Рисунок 1 – механическая характеристика
> M[nom]:=4500/25.3;
U[tr]:=R[c]/C*M[c];
![]()
![]()
> KgB1:=1/C;
KgB:=eval(KgB1,C=1.27);
![]()
![]()
>
> omega4:=eval(KgB*(U[tp]-U[tr]),[R[c]=0.69,C=1.27,M[c]=0]);
omega5:=eval(KgB*(U[tp]-U[tr]),[R[c]=0.69,C=1.27,M[c]=0.3*M[nom]]);
omega6:=eval(KgB*(U[tp]-U[tr]),[R[c]=0.69,C=1.27,M[c]=0.5*M[nom]]);
plot([omega4(U[tp]),omega5(U[tp]),omega6(U[tp])],U[tp]= 0..120,0..60);
![]()
![]()
![]()
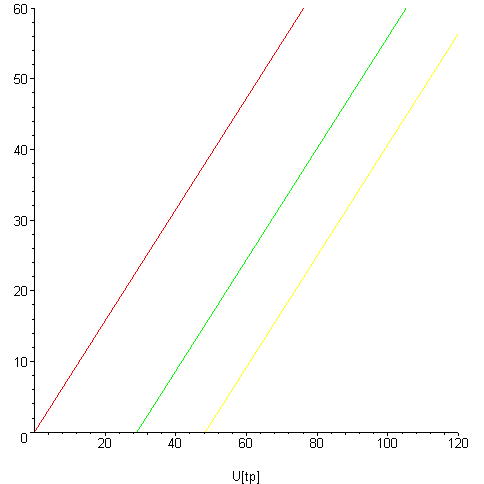
Рисунок 2 – регулировочная характеристика