

лабораторная работа / ОПРЕДЕЛЕНИЕ ВРЕМЕННЫХ И ЧАСТОТНЫХ ХАРАКТЕРИСТИК САУ В MATLAB (4)
.docx-
БАЛАКОВСКИЙ ИНСТИТУТ ТЕХНИКИ, ТЕХНОЛОГИИ И УПРАВЛЕНИЯ (ФИЛИАЛ)
-
ГОУ ВПО «САРАТОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
-
ФАКУЛЬТЕТ ИНЖЕНЕРНО – СТРОИТЕЛЬНЫЙ
-
КАФЕДРА «УПРАВЛЕНИЕ И ИНФОРМАТИКА В ТЕХНИЧЕСКИХ СИСТЕМАХ
-
-
-
ЛАБОРАТОРНАЯ РАБОТА №4
по дисциплине
Теория автоматического управления
Определение временных и частотных характеристик Систем автоматического управления в Matlab
Выполнила: ст. гр. УИТ – 32
Чудных Е.Н.
Приняла:
Комлева О.А.
2010
Цель работы: получение навыков исследования линейных динамических моделей в программном пакете Matlab и ознакомление с временными и частотными характеристиками систем автоматического управления (САУ).
1. Создадим LTI-объект с именем w, для этого выполним:
>> w=tf(-[1,7,0],[2,4,0,9,6])
Transfer function:
-s^2 - 7 s
-----------------------
2 s^4 + 4 s^3 + 9 s + 6
2. Найдем полюса и нули передаточной функции с использованием команд pole, zero
>> pole(w)
ans =
-2.5209
0.5602 + 1.2927i
0.5602 - 1.2927i
-0.5996
>> zero(w)
ans =
0
-7
3. Построим переходную функцию командой step(w)
>>step(w)
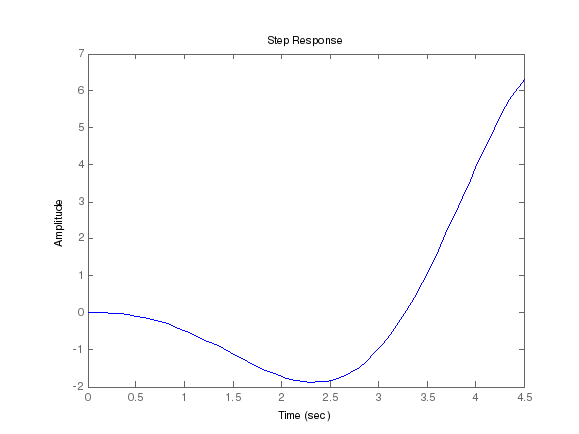
Рисунок 1 - Переходная функция h(t).
4. Построим импульсную переходную функцию командой impulse(w)
>>impulse(w)
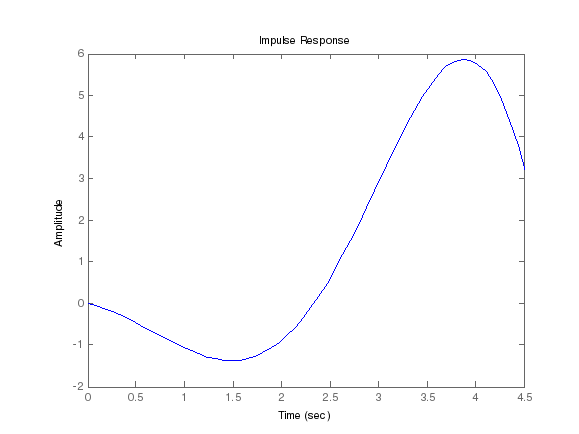
Рисунок 2 - Импульсная переходная функция.
5. Диаграмму Боде получим, используя команду bode(w)
>>bode(w)
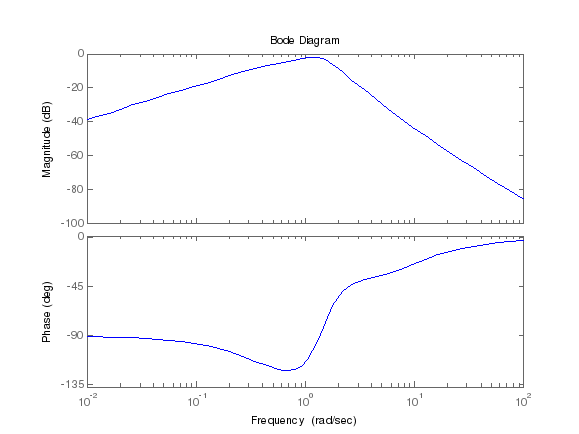
Рисунок 3 - Логарифмические частотные характеристики.
6. Определим частотный годограф Найквиста, выполнив команду nyquist(w)
>>nyquist(w)

Рисунок 4 - Частотный годограф.