

Параметры переходных процессов.
При управляющем воздействии.
Схема при управляющем воздействии, где все сигналы на возмущение делаем равным нулю.
Установившиеся значения управляемых координат x1 и x2 при t → ∞: xуст1=0; xуст2=2.07
Показатели качества:
1) время регулирования Tрег1=7.47с; Tрег2=6.16с
2) максимальное перерегулирование (%) σ1= inf; σ2=0;
При возмущающем воздействии.
Установившиеся значения управляемых координат x1 и x2 при t → ∞: xуст1=1; xуст2=--1.82
Показатели качества:
1) время регулирования Tрег1=6.16 с; Tрег2=5.34с
2) максимальное перерегулирование (%) σ1= 0; σ2= 0;
Показатели качества этого нормированного переходного процесса (для координаты xN):
1) время регулирования TрегN= 4.74с. 2) максимальное перерегулирование σmaxN=0 %.
Для сравнения времени регулирования координат состояния x2 и xN приведем Tрег2 для координаты x2 к относительным единицам, умножив его на величину Ω. В результате получим Tрег2* = 4.74 с.
εσ= ;
εТрег=
;
εТрег=
В результате синтеза ОУ настроен на желаемое распределение корней характеристического полинома, соответствующее биномиальной стандартной линейной форме. Погрешности настройки εσ=0%, εТрег=0%. Показатели качества улучшились, но появилась ошибка регулирования.
Задача №3.
Синтезировать наблюдатель Люенбергера полного порядка с распределением корней характеристического полинома по биномиальной стандартной линейной форме и среднегеометрическим корнем, равным
![]() .
.
Примем
![]()
В качестве измеряемой координаты вектора состояния принять х1.
Динамическая
подсистема для оценивания вектора
координат состояния строится на основе
математической модели ОУ путем ее
дополнения «стабилизирующей добавкой»
![]() [1]. Так как в
системе производится прямое измерение
х2,
матрица выхода
[1]. Так как в
системе производится прямое измерение
х2,
матрица выхода
![]() ,
,
а
сам вектор выходных (измеряемых)
переменных:
 .
.
На основании последних соотношений и системы уравнений
![]()
Математическая модель наблюдателя Люенбергера полного порядка:

Проверка условия наблюдаемости объекта
выражаемого требованием равенства ранга матрицы наблюдаемости порядку ОУ rang(Н) = 2 [1].
Матрица наблюдаемости для принятого объекта (3.1) равна
![]() ,
,
![]() =
=
![]()

![]() rang(Н)
= 2, что удовлетворяет условию наблюдаемости.
rang(Н)
= 2, что удовлетворяет условию наблюдаемости.
Включение в подсистему оценивания координат «стабилизирующей добавки» влияет на собственные динамические свойства наблюдателя, которые должны обеспечить требуемую форму и качество свободных составляющих переходного процесса. По этой причине элементы матрицы L определяются из нормированного характеристического полинома Dн(р), который предлагается принять соответствующим биномиальной стандартной линейной форме [1]:
![]() .
.
Увеличение
среднегеометрического корня
![]() по соотношению к
по соотношению к![]() позволяет разнести темпы процессов в
синтезированной САУ с модальным
регулятором и в подсистеме оценивания
координат состояния, в результате чего
наличие наблюдателя Люенбергера
практически не оказывает влияния на
динамику системы управления [1].
позволяет разнести темпы процессов в
синтезированной САУ с модальным
регулятором и в подсистеме оценивания
координат состояния, в результате чего
наличие наблюдателя Люенбергера
практически не оказывает влияния на
динамику системы управления [1].
Характеристический полином наблюдателя

![]()
Приравняв
соответствующие коэффициенты ![]() и
и
![]() ,получим:
,получим:
![]()

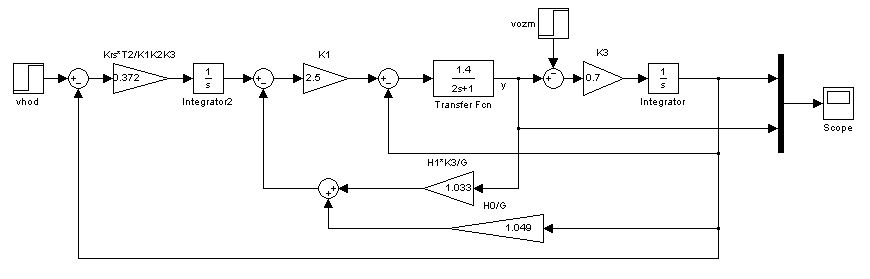
Структурная схема синтезированной замкнутой системы с наблюдателем Люенбергера полного порядка и модальным регулятором
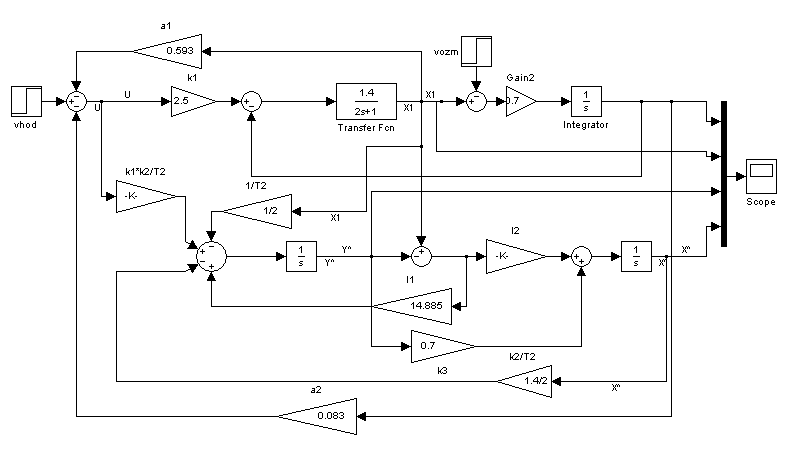
Рис. 4. Структурная схема СМУ с наблюдателем полного порядка.
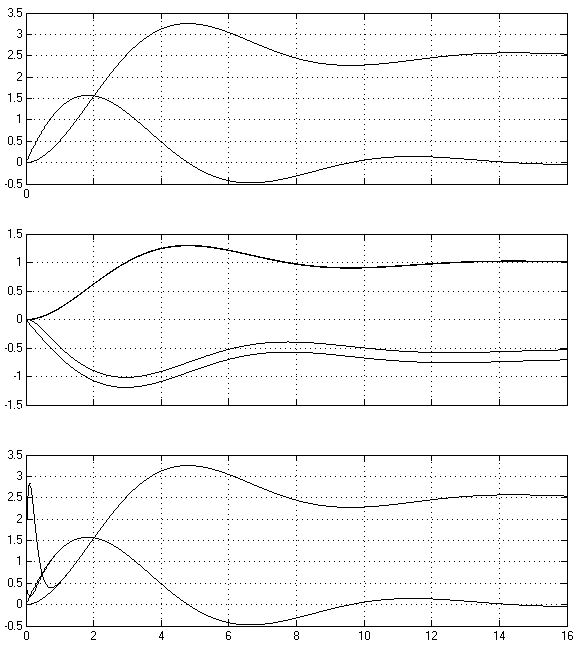
Рис. 5. Переходные процессы «ОУ + НПП»
а) по управляющему воздействию с нулевыми начальными условиями,
структурный синтез наблюдателя выполнен правильно, координаты и их оценки совпадают.
б) по возмущающему воздействию с нулевыми начальными условиями,
-статические
ошибки наблюдения координат состояния
ОУ: 
равны расчетным значениям, расчет выполнен верно
-причина возникновения указанных ошибок заключается в том, что при синтезе НПП не учитывается влияние неконтролируемых возмущений.
в) по управляющему воздействию с отклонениями по начальным условиям
Работа наблюдателя Люенбергера при отклонениях по начальным условиям: в момент времени от 0 до 1с координаты наблюдателя и ОУ не совпадают, далее оценки втягиваются и наблюдатель отслеживает работу координат ОУ для координаты х2
Для координаты х1 время притягивания оценки 0,5с

Рисунок 5. 1 Переходные процессы в системе СМУ замкнутой через НПП.
а) по управляющему воздействию с нулевыми начальными условиями,
прямые показатели качества по выходной координате:
1) время регулирования: Трег2=6,16с 2) максимальное перерегулирование: σmax2=0%
Влияние наблюдателя на качество СМУ не оказывается;
б) по возмущающему воздействию с нулевыми начальными условиями,
статические
ошибки наблюдения 
равны ошибкам наблюдения в системе “ОУ + НПП”,
При замыкании СМУ через НПП значения ошибок наблюдения не изменяется.
в) по управляющему воздействию с отклонениями по начальным
Тпп- время переходного процесса, Тпр- время притягивания оценки
коэффициент разделения движения СМУ и наблюдателя К= Tпп/ Tпр= 10/1=10 равен принятому при расчетах. Параметрический синтез наблюдателя выполнен верно.
Задача №4.
Вектор
неизмеряемых переменных z
= C1X
определяется как n
– k
и в соответствии с условиями
 [1]
[1]
![]() где
где
![]() - невырожденная матрица, состоящая из
двух блоков С и С1.
- невырожденная матрица, состоящая из
двух блоков С и С1.
Матрицы
![]() ,
,

![]()
Таким
образом, наблюдатель Люенбергера
пониженного порядка можно описать
дифференциальным уравнением [1]:
![]()
Составим
однородное уравнение, обнуляя внешнее
воздействие (![]() )
)
![]()
![]()
Характеристический
полином НПнП:
![]()
Приводя
его к нормированной форме:![]()
Коэффициент:
![]()
![]()
Исключим
производную y,
вводя вспомогательную переменную
![]()
В результате получим систему уравнений, описывающих наблюдатель пониженного порядка
![]()
![]()
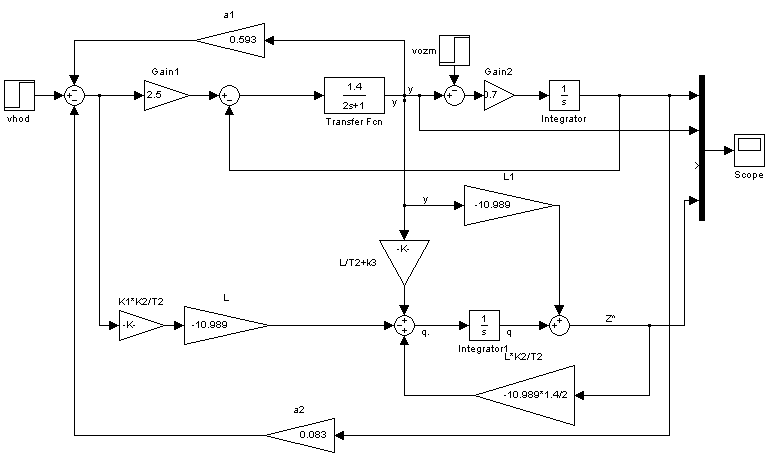
Рис. 6. Структурная схема СМУ с наблюдателем пониженного порядка
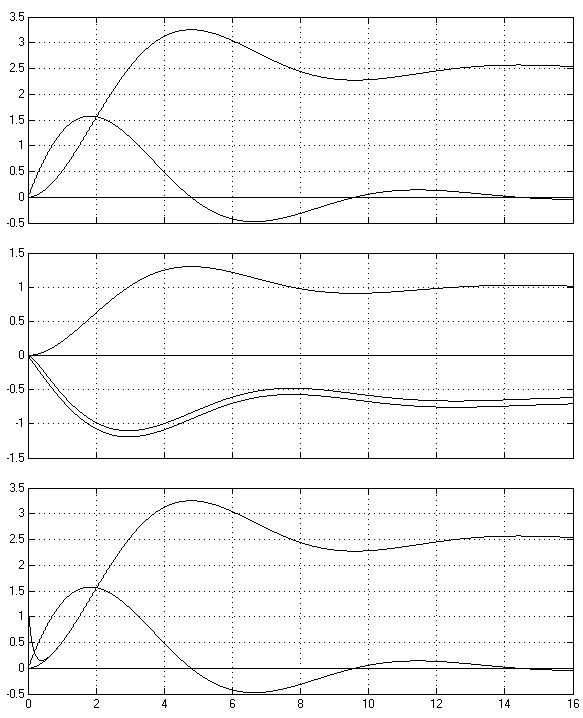
Рис. 6.1. Переходные процессы «ОУ + НПнП»
а) по управляющему воздействию с нулевыми начальными условиями,
Структурного синтез наблюдателя выполнен верно: координата и её оценка совпадают.
б) по возмущающему воздействию с нулевыми начальными условиями,
статическая
ошибка наблюдения: ![]()
равна расчетной, расчет выполнен верно
-причина возникновения указанных ошибок заключается в том, что при синтезе НПнП не учитывается влияние неконтролируемых возмущений.
в) по управляющему воздействию с отклонением по начальным условиям
Работа НПнП при отклонениях по начальным условиям: в момент времени от 0 до 0.5с координаты наблюдателя и ОУ не совпадают, далее оценка притягивается и наблюдатель отслеживает работу координаты х1.

Рисунок 6.2 Переходные процессы в системе СМУ замкнутой через НПнП.
а) по управляющему воздействию с нулевыми начальными условиями,
прямые показатели качества по выходной координате:
1) время регулирования: Трег2=6,16(с) 2) максимальное перерегулирование: σmax2=0%
Влияние наблюдателя на качество СМУ не оказывается;
б) по возмущающему воздействию с нулевыми начальными условиями,
статическая
ошибка наблюдения ![]() ,
,
равна ошибке наблюдения в системе “ОУ + НПнП ”,
При замыкании СМУ через НПнП значение ошибки наблюдения в установившемся режиме не изменяется.
в) по управляющему воздействию с отклонениями по начальным условиям
коэффициент разделения движения СМУ и наблюдателя К= Tпп/ Tпр= 10,5/0.9=11,7 больше принятого при расчетах.
Параметрический синтез наблюдателя выполнен верно.
г) Коэффициент разделения движений, экспериментально определенный для системы модального управления с наблюдателем пониженного порядкавыше соответствующего коэффициента для СМУ, замкнутой через наблюдатель полного порядка; быстродействие НПнП выше НПП.
Задача №5.
Определим ошибку наблюдения координат состояния ОУ, обусловленную действием неконтролируемого возмущающего воздействия на наблюдатель Люенбергера пониженного порядка.
![]()
![]()
Для определения ошибки в установившемся режиме возьмем предел при t→∞:
![]()
![]()
![]()
![]()
Определим ошибку наблюдения координат состояния объекта управлени, обусловленную действием неконтролируемого возмущающего воздействия на наблюдатель Люенбергера пониженного порядка
y=x2, z=x1
Ошибка
![]()
![]()
Приведем эквивалентные преобразования:
![]()
![]()
Для
определения ошибки в установившемся
режиме возьмем предел при t→∞
![]()
![]() :
:
![]()
Увеличение среднегеометрического корня наблюдателя позволит повлиять на величину ошибки.
Результаты поиска ошибки наблюдения координат состояния объекта управления (рис. 1), обусловленной действием неконтролируемого возмущающего воздействия на наблюдатели Люенбергера полного и пониженного порядков опытным путем совпали с результатами аналитических расчетов.
Задача №6.
Произведем синтез замкнутой системы при полных измерениях на основании модифицированного модального метода с распределением корней характеристического полинома и быстродействием, заданным в пункте 2.
Модальный
метод синтеза линейных систем, не имеющих
форсирующих свойств, гарантирует лишь
желаемую форму и показатели качества
переходных процессов, однако при этом
не обеспечивает требуемую статическую
точность регулирования. Модифицированный
модальный метод устраняет данный
недостаток за счет введения в систему
так называемого регулятора “статики”,
имеющего
передаточную функцию интегрирующего
звена
![]()
Дополнение классического модального регулятора интегральной составляющей обеспечивает в САУ астатизм по входным воздействиям и одновременно увеличивает порядок характеристического полинома ОУ D(p) на единицу.
Для решения поставленной задачи будем опираться на операторную методику синтеза одноканальных систем, которая следует из предложенной в статье [2]. В основу методики положена расчетная структурная схема, приведенная на рис.9.

Структурная схема САУ, синтезированной модифицированным модальным методом, рис.7.
Здесь
![]() - “правильная” [1, стр. 18] передаточная
функция ОУ (рис. 1), где полиномыG(p)
и D(p)
имеют соответственно степени m
и n,
m
< n;
Wрс(p),
Wрд(p)
- последовательное и параллельное
корректирующие устройства, названные
автором [2] регуляторами “статики” (РС)
и “динамики” (РД).
- “правильная” [1, стр. 18] передаточная
функция ОУ (рис. 1), где полиномыG(p)
и D(p)
имеют соответственно степени m
и n,
m
< n;
Wрс(p),
Wрд(p)
- последовательное и параллельное
корректирующие устройства, названные
автором [2] регуляторами “статики” (РС)
и “динамики” (РД).
Предположим, что все нули объекта имеют отрицательную действительную часть, тогда регулятор статики может быть принят в виде
![]()
где
![]() -
коэффициент передачи РС. И регулятор
динамики
-
коэффициент передачи РС. И регулятор
динамики
![]()
Передаточная функция замкнутой системы по задающему воздействию v
(6.1)![]()
будет
гарантировать желаемые показатели
качества переходной характеристики
при вычислении коэффициентов полинома
![]() и коэффициента передачи РС
и коэффициента передачи РС![]() из
условий равенства характеристического
полинома САУ выбранному нормированному
полиному третьего порядка
из
условий равенства характеристического
полинома САУ выбранному нормированному
полиному третьего порядка
![]()
при
этом интегральная часть РС обеспечивает
отсутствие статической ошибки
регулирования при
![]() (по
управлению и возмущению)[1,
стр. 19]:
(по
управлению и возмущению)[1,
стр. 19]:
![]()
Запишем передаточную функцию системы ОУ:
![]()
![]()
![]()
![]()
Получим передаточную функцию замкнутой системы, структурная схема которой изображена на рис. 7, по задающему воздействию v
![]()
Приравнивая соответствующие коэффициенты знаменателя полученной передаточной функции к коэффициентам нормированного полинома третьего порядка
![]()
получим систему уравнений для нахождения h1, h0 и kрс
![]()
![]()
![]()
Запишем операторное уравнение для сигнала xрд(p)
![]()
Перейдем из области изображений в область оригиналов для того, чтобы избежать операцию дифференцирования х2:
![]()
![]()
Структурная схема замкнутой системы модифицированного модального управления изображена на рис. 10.
Структурная схема замкнутой системы модифицированного модального управления, рис. 8.

Структурная схема желаемой САУ, рис. 9.
Рассмотрим переходные процессы в системе модифицированного модального управления

Рисунок 10. Переходные процессы в СММУ
По управлению: xуст1=0; xуст2=1; Tрег1=9,98(с); Tрег2=8,18(с); σ1= inf; σ2= 0; xN=1, σN= 0;
TN=8.18 (с);
По возмущению: xуст1=1; xуст2=0; Tрег1=8.53(с); Tрег2=9.43(с); σ1=29.4%; σ2=inf;
Погрешности настройки: εσ= 0%; εТрег= 0%.

Рисунок 11. СММУ замкнутая через НПП
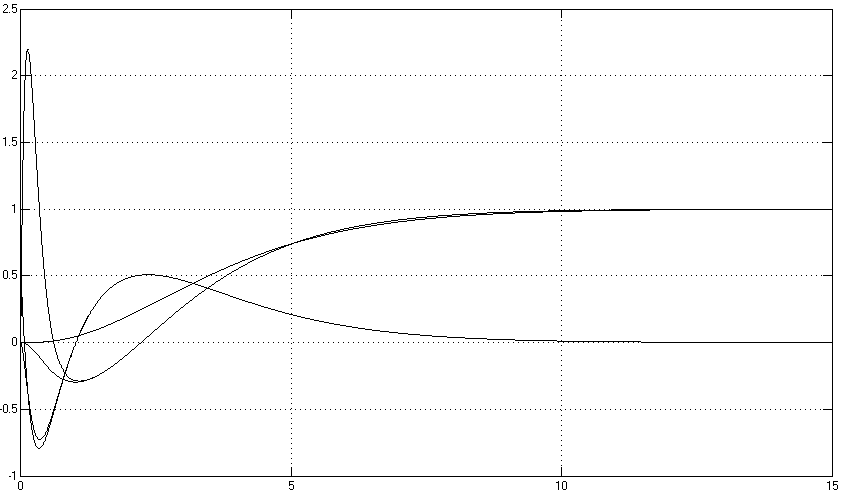
Рисунок 11.1. Переходные процессы по управляющему воздействию с отклонениями по начальным условиям СММУ замкнутой через НПП
прямые показатели качества по выходной координате:
1) время регулирования: Трег2=7.7744(с)
2) максимальное перерегулирование: σmax2=0%
погрешности по прямым показателям качества, вносимые наблюдателем полного порядка:
εσ= ;
εТрег=
;
εТрег=
Влияние НПП на качество СММУ: увеличилось время регулирования, перерегулирование не изменилось.
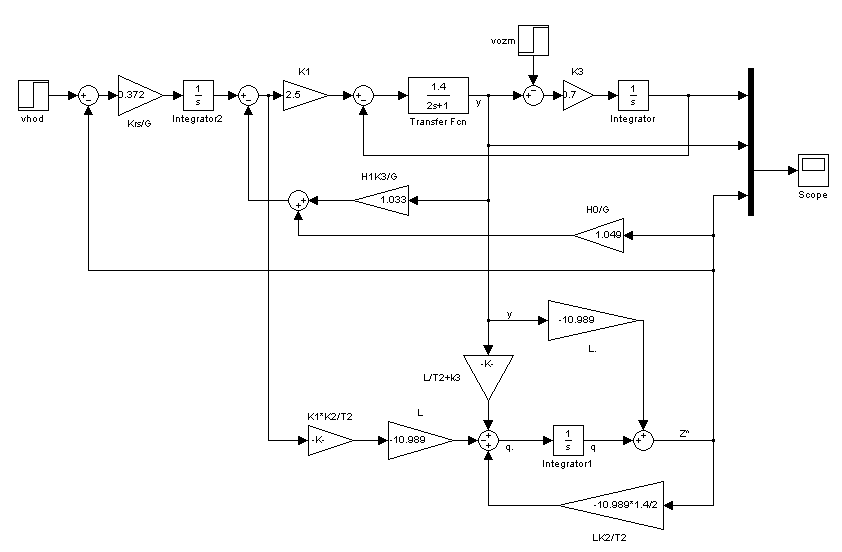
Рисунок 12. СММУ замкнутая через НПнП

Рисунок 12.1 Переходные процессы по управляющему воздействию с отклонениями по начальным условиям СММУ замкнутой через наблюдатель пониженного порядка
прямые показатели качества по выходной координате:
время регулирования: Трег2=8,1366с
2) максимальное перерегулирование: σmax2=0
погрешности по прямым показателям качества, вносимые наблюдателем пониженного порядка:
εσ= ;
εТрег=
;
εТрег=
НПнП оказывает влияние на качество СММУ, увеличивая время переходного процесса.
Погрешность по прямым показателям качества вносимая НПнП меньше погрешности вносимой НПП.
Определив показатели качества, делаем вывод, что на систему модифицированного модального управления большее влияние оказывает наблюдатель Люенбергера полного порядка. Это влияние сказывается на времени регулирования, т.е. процессы в системе с наблюдателем полного порядка протекают дольше, чем в системе с наблюдателем пониженного порядка
В результате синтеза СМУ было увеличено время регулирования по выходной координате Трег2=6,16(с), перерегулирование стало равным нулю в соответствии с настройкой по биномиальной стандартной линейной форме.
Достоинства СМУ:
Синтез закона модального управления и наблюдателя, проверка условий управляемости и наблюдаемости сводится к простым операциям над матрицами: умножения, деления, вычисление ранга и определителя и может быть легко автоматизирован.
Синтез закона модального управления и наблюдателя могут выполняться раздельно
Для синтеза закона модального управления и наблюдателя используются одни и те же соотношения модального синтеза K; L
Недостатки:
СМУ не гарантирует заданной статической точности регулирования
Качество переходных процессов в САУ с объектами, имеющими форсирующие свойства, не соответствует стандартной линейной форме, так как зависит не только от знаменателя, но и числителя передаточной функции ОУ
СММУ исключает данные недостатки и сохраняет преимущества СМУ.
В результате синтеза СММУ изменились прямые показатели качества ОУ в соответствии с настройкой по биномиальной стандартной линейной форме: Трег2=8,18(с) максимальное перерегулирование: σmax2=0%, установившееся значение выходной координаты составило: xуст2=1
СММУ выигрывает у СМУ по статике, так как ошибка регулирования в установившемся режиме равна нулю, но проигрывает по динамике так как увеличивается время переходного процесса.