

3.5. Частотная совместимость.
Большинство ЛН имеют фиксированную частоту излучения, однако в некоторых реализована возможность выбора частоты из нескольких каналов. Из-за все возрастающего числа средств радиосвязи и правительственного регулирования радиодиапазона ЛН с ограниченным частотным диапазоном часто конфликтуют с другими электронными средствами. Если частоты, на которых работает ЛН, уже используются другими передатчиками, то показания ЛН будут случайными и ненадежными.
Это общая проблема для большинства крупных городов, и, по моему мнению, решена она лишь в ЛН «ORION».
Таким образом, ЛН должен работать в широком частотном диапазоне и автоматически находить свободный рабочий канал во избежание частотного наложения от других передатчиков.
3.6. Уровень мощности и чувствительность.
При сравнении ЛН многие берут за основу мощность передатчика, так как данная характеристика относительно легка для восприятия. Однако чувствительность приемника является не менее важной сравнительной характеристикой при оценке обнаружительной способности вообще. Также необходимо уяснить, что ЛН с небольшой мощностью, но качественным приемником может обладать более высокими обнаружительными характеристиками и проявлять себя в работе гораздо эффективнее, чем прибор с большей мощностью и плохим приемником. Важно иметь в виду, что мощный ЛН может вывести из строя другие электронные приборы и нанести вред человеческому здоровью. Мне объясняли, что многие модели российских импульсных ЛН используют дополнительную мощность для активации полупроводниковых соединений. Это неправильный подход. Диод, например, представляет собой простейшее полупроводниковое соединение, рассматриваемое в большинстве теорий по нелинейной локации. Инженеры-электронщики часто моделируют его как совершенный переключатель, позволяющий течь току только в положенном направлении. Однако это слишком грубое упрощение, чтобы использовать его при анализе теории нелинейной локации.
Полупроводниковое соединение не просто выполняет операцию «вкл/выкл», это определенная функция, изображенная на рис. 1 и описываемая формулой:
I = I0(exp(qU/kT) —1),
где I0 - ток утечки; q - заряд электрона; к - постоянная Больцмана; Т - температура;
U - напряжение, приложенное к диоду.
Таким образом, при наличии высокочувствительного приемника ЛН с небольшой мощностью может быть гораздо эффективнее, чем мощный прибор.
По моему мнению, «ORION» - практически единственный в мире прибор, в котором для повышения чувствительности приемника используется цифровая обработка сигнала (DSP processing). «ORION» позволяет значительно повысить эффективность обнаружения за счет хорошего входного тракта приемника и интегрирования результатов измерений. Для оптимизации использования прибора пользователь может вручную устанавливать уровень интеграции цифровой обработки сигнала.
Более того, «ORION» - единственный в своем роде прибор, в котором использованы алгоритмы для автоматического контроля уровня излучения. В том случае если сигнал на входе приемника слишком велик и возникает перегрузка, прибор автоматически снижает мощность излучения для более точных измерений. Когда уровень принимаемого сигнала возвращается к норме, мощность увеличивается до первоначального значения автоматически.
Эти особенности значительно облегчают работу с ЛН «ORION» при проведении поисковых мероприятий, исключая необходимость постоянной регулировки.
Вывод: Важно понять, что во время работы нелинейного локатора происходят два процесса: (1) Обнаружение нелинейного соединения и (2) Выявление различий между настоящими и ложными полупроводниками. О нелинейном локаторе нужно судить как по дальности обнаружения, так и способности различать эти соединения.
Наиболее важной характеристикой НЛ является дальность обнаружения - глубина проникновения сигнала в предметы, находящиеся в месте поиска. Однако концепция этой характеристики должна пониматься правильно и использоваться только для сравнения НЛ во время испытаний в одинаковых условиях. Более того, большая дальность обнаружения не обязательно xopoшо характеризует НЛ; вы можете просто обнаруживать электронные устройства (компьютеры, телефоны) в соседней комнате. Во время работы НЛ должен иметь не только достаточную дальность обнаружения, но и возможность соответствующей регулировки (обычно с помощью регулировки мощности передатчика или. как в случае с “Орионом”, за счет регулировки степени усиления сигнала приемника) для обеспечения необходимой глубины обнаружения в обследуемом материале. Исторически модели нелинейных локаторов в Соединенных Штатах основывались лишь на сравнении второй и третьей гармоник. Однако также важно использовать методы аудио анализа полупроводниковых соединений, такие, как “эффект затухания” и физического воздействия. Для максимальной надежности хороший нелинейный локатор должен использовать несколько методов идентификации настоящих и ложных полупроводников.
Оценка фундаментальных пределов в нелинейной радиолокации
Направление локации объектов искусственного происхождения, обладающих нелинейными свойствами, сверхвысокочастотным полем возникло в 70-х гг. прошлого столетия и получило название нелинейной радиолокации. Одно из возможных направлений развития данного метода зародилось в рамках программы «METRA» в США. Целью ее являлось создание вертолетной нелинейной радиолокационной станции, позволяющей выявлять вооруженных людей в густых зарослях джунглей, нелинейным элементом которых являлись стыки металлов в оружии. Одновременно в СССР это направление развивалось по линии специальных ведомств в интересах обнаружения инженерных мин. Итогом последних исследований было создание нелинейной переносной радиолокационной станции ИНМ, принятой на вооружение в начале 80-х гг. Сущность данного метода локации заключалась в регистрации гармоник одночастотных зондирующих сигналов в амплитудно-частотном спектре сигнала, отраженного от лоцируемого объекта с нелинейными вольтамперными и вольтфарадными характеристиками. Было установлено, что такими характеристиками обладают объекты искусственного происхождения, в составе которых имеются полупроводниковые радиоэлементы, а также точечные прижимные металлические контакты. Необходимо отметить, что основная доля энергии отраженного сигнала при локации таких объектов будет содержаться в амплитудно-частотном спектре сигнала, отраженного от элементов объекта с линейными свойствами и лишь некоторая ее часть с нелинейными. Последнее обстоятельство обуславливает предельные возможности метода нелинейной радиолокации по обнаружению, поиску и измерению координат объектов.
Известно, что становлению радиотехники как науки в широком смысле этого слова, способствовало установление фундаментальных пределов, определяющих предельно достижимые параметры радиоэлектронной аппаратуры. В настоящее время под фундаментальным пределом понимают некоторый предел, за которым начинается лавинообразный рост (или уменьшение) какого-либо качественного показателя радиоэлектронной аппаратуры. Например, к настоящему времени в области антенной техники установлено четыре фундаментальных предела: электрически малая антенна, сверхнаправленная антенна, сверхразрешающие антенны и антенны с высоким усилением. Качественный анализ процессов, протекающих в нелинейных электрических элементах объектов поиска, показывает, что в нелинейной радиолокации также имеется свой фундаментальный предел – это предел дальности обнаружения. В большинстве случаев он обусловлен электрическим пробоем полупроводниковых нелинейных элементов (р-п перехода полупроводникового радиоэлемента, точечного прижимного металлического контакта с туннельной проводимостью и др.). При удалении объекта поиска от нелинейной радиолокационной станции, при фиксированной чувствительности ее приемного устройства, требуется увеличивать плотность потока мощности, падающего на объект сверхвысокочастотного поля. Только в этом случае будет обеспечиваться обнаружение объекта искусственного происхождения. Однако при достижении определенной, в каждом случае своей, плотности потока мощности, произойдет пробой нелинейного элемента – чаще всего электрический пробой р-п перехода. При этом происходит лавинообразное уменьшение нелинейной эффективной поверхности рассеяния объекта поиска, который становится «невидимым» для нелинейных радиолокационных станций. Именно величина максимально возможного наведенного напряжения на нелинейном элементе и будет определять (при фиксированной чувствительности приемника) дальность действия нелинейного радиолокатора по обнаружению конкретного объекта поиска. Наибольшая дальность будет обеспечиваться для объектов, в которых нелинейный элемент наилучшим образом согласован с переизлучающей антенной (т.е. остальной конструкцией). Именно в этом случае обеспечивается наибольшая переизлучаемая мощность (на гармониках) при меньшем напряжении на нелинейном элементе.
Необходимо отметить, что в обычной (т.е. линейной) радиолокации отсутствует фундаментальный предел по дальности обнаружения. Увеличение излучаемой мощности передатчика радиолокационной станции практически неограниченно увеличивает дальность обнаружения объектов вплоть до космических масштабов. Формально предел дальности здесь тоже может наступать при напряженности электрической составляющей падающего электромагнитного поля, сравнимой с внутриатомными напряженностями электрического поля вещества (металла, пластмассы), имеющими огромную величину. На практике он ограничен возможностями современной науки по созданию мощных передающих устройств, высоконаправленных антенных систем и чувствительных приемных устройств (ориентировочно они составляют следующие пределы по импульсной мощности Ри до нескольких сот кВт в импульсе, коэффициенту направленного действия G до 20 000 и чувствительности приемного устройства Pпр.мин = 10-20 Вт). В то же время пробой нелинейных элементов объектов поиска, как будет показано ниже, может наступать при сравнительно небольших плотностях потока падающего поля – вполне реализуемой современной техникой.
Оценим величину предельной дальности обнаружения идеализированного объекта поиска в виде нелинейного полуволнового электрического вибратора, в центр которого включен высокочастотный полупроводниковый диод. Предельная дальность обнаружения данного резонансного объекта будет больше, чем обычных апериодических (реальных) объектов.
Анализ процессов, протекающих в нелинейных элементах (p-n переходах, контактах металл – диэлектрик − металл) объектов поиска, показывает (рис. 1), что в нелинейной радиолокации фундаментальный предел по дальности обнаружения обусловлен чаще всего электрическим пробоем. Физический смысл его существования объясняется наличием такой плотности потока мощности электромагнитной волны падающего поля Ппад.пред, при которой еще существует нелинейный эффект. Дальнейшее увеличение плотности потока мощности падающего поля Ппад приводит к лавинообразному уменьшению плотности потока мощности отраженной волны Потр.
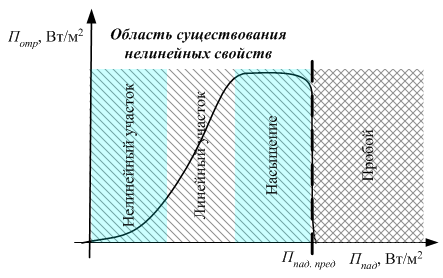 Рис.
1. Качественная зависимость, поясняющая
существование
фундаментального
предела в нелинейной радиолокации
Рис.
1. Качественная зависимость, поясняющая
существование
фундаментального
предела в нелинейной радиолокации
Оценим величину предельной дальности обнаружения идеализированного объекта поиска в виде нелинейного полуволнового электрического вибратора, в центр которого включен высокочастотный полупроводниковый диод. Предельная дальность обнаружения данного резонансного объекта будет больше, чем обычных объектов.
Считаем, что ось
вибратора параллельна напряженности
электрического поля ![]() падающей
электромагнитной волны. В результате
взаимодействия электромагнитного поля
подающей волны Ппад с
объектом в вибраторе наводится
электродвижущая сила:
падающей
электромагнитной волны. В результате
взаимодействия электромагнитного поля
подающей волны Ппад с
объектом в вибраторе наводится
электродвижущая сила:
![]() (1)
(1)
где hд = λпад/π – действующая высота полуволнового вибратора; λпад – длина волны первичного поля.
Известно, что плотность потока мощности электромагнитного поля и напряженность его электрической составляющей связаны соотношением:
 (2)
(2)
где ρ0 – волновое сопротивление свободного пространства.
Кроме того, из теории радиолокации известно, что вторичное поле у антенной системы радиолокатора равно:
 (3)
(3)
где σ – ЭПР объекта, м2.
Экспериментально установлено, что для нелинейного полуволнового вибратора при Ппад > 1 – 2 Вт/м2 зависимость между Ппад и Ппр становится постепенно линейной. Здесь имеется некоторая аналогия по отношению к режимам работы квадратичного и линейного диодного детекторов. В нашем случае «насыщение» обусловлено тем, что при использовании дециметровых волн при Ппад > 1 – 2 Вт/м2 в полуволновом вибраторе наводится электродвижущая сила более 1 – 2 В. Например, при Ппад = 1 Вт/м2, λпад = 0,6 м, ρ0 = 377 Ом в полуволновом вибраторе наводится электродвижущая сила, равная 3,68 В. В большинстве случаев для «апериодических» нелинейных объектов «насыщение» наступает при Ппад > 10 Вт/м2. Известно, что в нелинейной радиолокации целесообразно использовать импульсный режим работы с большой скважностью (Q = 103 – 104). При этом выход из строя нелинейного элемента будет обусловлен электрическим пробоем, а не тепловым. Здесь имеется некоторая аналогия с электрическими процессами в сверхвысокочатотных волноводах. Наибольшая проходящая мощность для них ограничивается электрическим пробоем, а не тепловыми процессами. Величина напряжения пробоя для большинства высокочастотных полупроводниковых р-п переходов составляет от 40 до 150 В. В нелинейной радиолокации при больших плотностях потока мощности падающей волны (Ппад > 1 – 10 Вт/м2) величина нелинейной эффективной поверхности рассеяния σн входит в «насыщение» и не зависит от величины первичного поля. То есть в этом случае нелинейный объект поиска становится линейным – как в обычной радиолокации. Но вторичное поле (отраженное) все равно регистрируется на гармонике, а не на основной частоте. На практике величина нелинейной эффективной поверхности рассеяния на 2-ой гармонике в режиме «насыщения» на 1 – 2 порядка больше, чем «нормированная» нелинейная эффективная поверхность рассеяния (т.е. при плотности потока энергии падающего поляПпад = 1 Вт/м2).
Из всего изложенного величину плотности потока мощности у приемной антенны нелинейного радиолокатора на гармонике можно оценить по следующей формуле:
 (4)
(4)
где σн(нас) – нелинейной эффективной поверхности рассеяния в режиме насыщения; r – расстояние между объектом поиска и нелинейным радаром; Uн – напряжение на нелинейном элементе.
Отсюда выражение для предельной дальности обнаружения в свободном пространстве полуволнового нелинейного диполя, при котором величина U достигнет напряжения пробоя Un, имеет вид:
 (5)
(5)
где Ппр.мин– заданная чувствительность (по полю) приемника нелинейного радара.
При оценке максимальной дальности обнаружения реальных объектов они могут быть заменены полуволновым диполем, в центре которого, помимо диода, включена комплексная линейная нагрузка. Эта нагрузка уменьшает нелинейную эффективную площадь вибратора до величины, равной нелинейной эффективной площади рассеяния объекта искусственного происхождения. Поэтому в первом приближении, данной формулой можно воспользоваться при оценке предельной дальности обнаружения реальных объектов, взяв их нелинейную эффективную поверхность рассеяния в режиме «насыщения». Анализ функциональной зависимости, при заданных условиях, для двух различных первичных электромагнитных полей на частотах 500 и 1000 МГц показывает, что с уменьшением длины волны (увеличением частоты первичного поля при равной плотности потока мощности), дальность обнаружения идеализированного объекта уменьшается. Физически это связано с уменьшением нелинейной эффективной площади рассеяния объектов искусственного происхождения, вследствие чего пробой нелинейных элементов наступает раньше. На практике для объекта в виде нелинейного полуволнового электрического вибратора, в зависимости от типа полупроводникового диода, нагруженного на него, и длины волны первичного электромагнитного поля λпад, нелинейная эффективная поверхность рассеяния в режиме насыщения находится в пределах 10-4 ≤ σн(нас) ≤ 108. Тогда предельная дальность обнаружения, для нелинейного метода локации, будет составлять от 100 м до нескольких километров (рис. 2).
 Рис.
2. К оценке предельной дальности
обнаружения идеализированного
объекта
поиска
в виде нелинейного полуволнового
электрического вибратора
в
свободном пространстве
Рис.
2. К оценке предельной дальности
обнаружения идеализированного
объекта
поиска
в виде нелинейного полуволнового
электрического вибратора
в
свободном пространстве
Произведем оценку разрешающей способности по угловым координатам и дальности нелинейного радиолокатора. Данная характеристика определяет возможность раздельного наблюдения нелинейных объектов по соответствующим координатам.
Направленные свойства антенной системы позволяют определить направление на объект поиска и определить разрешающую способность по азимуту и угловым координатам. При использовании метода максимума погрешность пеленга составляет:
![]() ,
(6)
,
(6)
где ΔG0,5 – ширина диаграммы направленности антенной системы по уровню половинной мощности.
Для дециметрового диапазона (λпад = 0,3 – 0,6 м) при размерах апертуры антенной системы около 0,5 – 0,7 м ширина диаграммы направленности ориентировочно составит Δφ0,5 ≈ 300. Отсюда точность определения расположения объекта искусственного происхождения по азимуту на поверхности грунта, находящегося на удалении 16 м от нелинейного радиолокатора, будет равна 1,8 – 4,4 м. При использовании метода сравнения («вилки»), что требует на практике двух приемных антенн с одинаковыми характеристиками, точность определения координаты в данном случае будет значительно выше и составит 0,18 – 0,44 м, но при этом необходимо увеличивать плотность потока падающего поля для достижения той же предельной дальности обнаружения.
Значительное увеличение азимутального разрешения может дать применение фазированной антенной решетки с частотным сканированием. Изменение частоты несущей на несколько МГц позволяет осуществлять сканирование основного лепестка диаграммы, направленности в пределах ±45° от нормали к антенной системе, то есть так называемое секторное сканирование. Применение подобной фазированной антенной решетки в виде «линейки» спиральных антенн наиболее целесообразно для нелинейной радиолокационной станции, разрешаемой на наземном подвижном носителе.
Определение расстояния до близко расположенных объектов требует применения очень коротких радиоимпульсов. Столь короткие импульсы могут не успеть «возбудить» нелинейные элементы объекта поиска, которыми в большинстве случаев являются полупроводниковые переходы транзисторов и диодов. Оценим минимально возможную длительность зондирующих радиоимпульсов, при которой еще не происходит значительного уменьшения нелинейной эффективной поверхности рассеяния.
Физически инерционность полупроводникового перехода обусловлена в основном временем установления напряжения первичного сверхвысокочастотного сигнала на его нелинейной емкости. Из известных радиотехнических процессов наиболее близок для нашего случая процесс детектирования коротких радиоимпульсов. Известно, что процесс установления входного напряжения для диодного детектора описывается выражением:
 (7)
(7)
где Кс – коэффициент детектирования; tз – время заряда; tр – время разряда.
Интеграл решается только численным интегрированием. Данные показывают, что величина напряжения U на емкости достигает 0,7 – 0,8 В от установившегося значения приt ≥ 10RcC. В нашем случае, при Rc ≈ Rб (базы) (Rб = 200 Ом) и С ≈ Со (Со = 10 пФ), что характерно для типичного высокочастотного кремниевого транзистора, длительность зондирующего радиоимпульса, в первом приближении должна быть не менее 20 нс.
Рассмотренный пример характеризует процесс в основном качественно. Более строгое решение требует численного решения соответствующего дифференциального уравнения, описывающего процесс формирования напряжения в нелинейном элементе отражателя. Расчетами установлено, что для высокочастотных транзисторов, у которых начальная емкость перехода эмиттер-база составляет 10 – 20 пФ, время установления составляет 10 – 20 нс, для низкочастотных транзисторов, у которых эта же емкость около 100 пФ – до 25 – 30 нс.
Из всего изложенного следует, что минимальная длительность зондирующих радиоимпульсов в нелинейной радиолокации составляет 10 – 20 нс. Отсюда максимально возможное разрешение по дальности составляет 1,5 – 3,0 м. Однако применение столь коротких радиоимпульсов требует создания широкополосной сверхвысокочастотной аппаратуры, с полосой пропускания около 100 МГц. Обеспечение необходимой помехоустойчивости подобной аппаратуры представляет собой весьма сложную задачу.
При максимальной скорости поиска с использованием переносной нелинейной радиолокационной станции – 3 км/ч, длительности зондирующего радиоимпульса tимп = 1 мкс, размере объекта поиска Δl ≈ 0,63 м и числе принимаемых импульсов N = 10, скважность зондирующего сигнала составит Q ≈ 3,6×104, это соответствует частоте следования импульсов Fимп ≈ 28 Гц. При локации объектов путем вращения антенного устройства вокруг своей оси с максимальной скоростью nоб = 0,5 об/с и шириной диаграммы направленности антенного устройства Δφ0,5 ≈ 300 (практически минимально возможная ширина диаграммы направленности для портативных антенн в метровом – дециметровом диапазонах) скважность составит Q ≈ 3,6×104, что соответствует частоте следования зондирующих импульсов Fимп ≈ 60 Гц. Поэтому скважность зондирующего сигнала для переносного нелинейного радиолокатора должна быть порядка Q ≈ 16×104. Это позволит при потребляемой передатчиками мощности Рпотр = 1 – 2 Вт создавать в передающей антенне импульсную мощность в несколько кВт при коэффициенте полезного действия передатчика около 30 – 50%.
Важная характеристика нелинейного радиолокатора – это максимально возможная скорость ведения поиска с носителя. Особенно актуальна она для нелинейных радиолокационных станций, размещаемых на воздушных носителях (вертолете, небольшом самолете), обладающих значительной скоростью. Оценим ее, воспользовавшись известной формулой для линейной радиолокационной станции бокового обзора. В нашем случае будет иметь вид:
 (8)
(8)
где Q0,5– ширина диаграммы направленности антенны по точкам половинной мощности (в радианах); r – расстояние до объекта поиска; FП – частота повторения зондирующих радиоимпульсов; Nмин – минимальное число принимаемых импульсов, обеспечивающих заданную чувствительность приемника нелинейной радиолокационной станции.
Так как Q0,5 = λпад/la, где la – длина антенны фазированной антенной решетки, то формула (8) приобретает вид:
Например, при λ1 = 0,3 м, r = 100 м, FП = 1000 Гц, Nmin = 10, la = 1 м максимальная скорость при вертикальном зондировании с воздушного носителя будет составлять 3000 м/с. Отсюда следует, что на практике скорость ведения поиска малоразмерных объектов будет ограничена только максимально возможной путевой скоростью самого носителя (ориентировочно – до 300 – 400 км/ч).
Процессы, происходящие в нелинейных радиолокационных отражателях очень сложны. Поэтому теоретические расчеты и выводы данной работы носят оценочный характер в условиях определенных ограничений.
Экспериментальные исследования свойств электрических нелинейных объектов
Имеющиеся в настоящее время результаты теоретических и экспериментальных исследований в области нелинейной радиолокации (НРЛ) не дают ответа на вопрос о поведении отклика сложного объекта, а также не раскрывают понятия "эффективная поверхность рассеяния" (ЭПР) даже для элементарного электрически нелинейного объекта (ЭНО) в виде вибратора, нагруженного на нелинейный элемент (НЭ).
Рассмотрим решение следующих задач:
— определение нелинейно преобразующих свойств объекта на основе общепринятой теории;
— экспериментальные исследования зависимости принимаемой мощности от дальности для преобразованного сигнала второй гармоники и сравнение с теоретическими моделями;
— экспериментальное исследование диаграммы обратного излучения сложного объекта.
Обратившись к модели НРЛ, можно увидеть, что нелинейная радиолокационная станция (НРЛС) принимает сигнал от ЭНО на частоте, не равной частоте излучения станции. Это означает, что ЭНО обладает следующими возможностями:
— имеет приемную систему для поглощения падающей энергии, которая в радиолокации определяется через плотность потока падающей мощности;
— преобразует поглощенную энергию в другой частотный диапазон (спектр), отличный от зондирующего;
— имеет систему излучения преобразованной энергии в другом частотном диапазоне (спектре).
В этой ситуации поглощенная энергия находится по формуле:
Ппад.SЭНОэф. = Рприн.НЭ,
где Ппад. — плотность потока падающей мощности(энергии);
SЭНОэф. — некая эффективная поверхность приемной системы ЭНО для поглощения падающей энергии;
Рприн.НЭ — поглощенная НЭ энергия, выраженная через мощность.
Для радиолокации значение эффективной поверхности приемной системы ЭНО выразим как:
SЭНОэф. =λ Gпринм.ЭНО/4П,
где Gпринм.ЭНО — параметр, характеризующий эффективность приемной системы ЭНО (в данном случае это коэффициент усиления приемной антенны ЭНО);
λ— длина волны излучения НРЛС.