

2. Математическая модель интегрирующего элемента
Пример
1. Построение
математической модели объекта управления
ОУ системы регулирования
уровня.
Функциональная и структурные схемы ОУ
приведены на рис. 6. Имеется емкость, в
которой необходимо стабилизировать
уровень. Объемные расходы реагентов на
входе и выходе, соответственно,
![]() .
Геометрические размеры емкости – объемV,
сечение S.
.
Геометрические размеры емкости – объемV,
сечение S.
Рис. 6

пусть начальный объем реагента в емкости при
 равен
равен ,
,за время
 в емкость пришло жидкости
в емкость пришло жидкости ,
ушло из емкости
,
ушло из емкости ,
,значение объема на момент времени
 равно
равно ,
,изменение объема dV за время dt равно разности объемов поступившего в емкость и вышедшего из емкости:
![]()
объем жидкости равен
 ,
тогда
,
тогда
 .
.уравнение, описывающее зависимость уровня от входного и выходного расходов будет иметь вид

Используя преобразование Лапласа при нулевых начальных условиях НУ,
запишем
![]()
![]()
![]()
При
использовании в качестве управляющего
воздействия
![]() ,
передаточная функция по управляющему
воздействию, соответственно, будет
,
передаточная функция по управляющему
воздействию, соответственно, будет
![]() .
Значение коэффициента
.
Значение коэффициента
![]() .
.
Построение
модели объекта управления при неизвестных
геометрических размерах производится
на основании экспериментальных данных.
Пусть имеется емкость, объем которой
![]() ,
сечение
,
сечение![]() ,
но нам размеры неизвестны. Произведем
эксперимент. Откроем входной вентиль
на заданное значение расхода, например
,
но нам размеры неизвестны. Произведем
эксперимент. Откроем входной вентиль
на заданное значение расхода, например![]() и запишем график изменения уровня
жидкости в емкости. Уровень будет расти
от начального значения
и запишем график изменения уровня
жидкости в емкости. Уровень будет расти
от начального значения![]() со скоростью, записанной на графике
(см. рис. 7). При данном расходе за
со скоростью, записанной на графике
(см. рис. 7). При данном расходе за![]() в емкость поступит
в емкость поступит![]() жидкости и уровень увеличится на
жидкости и уровень увеличится на![]() ,
что и отображено на экспериментально
полученном графике на рис. 7.
,
что и отображено на экспериментально
полученном графике на рис. 7.
Мы
знаем расход и имеем график изменения
уровня жидкости в процессе эксперимента.
При постоянном значении входного сигнала
![]() выходная переменная изменяется с
постоянной скоростью, следовательно,
мы имеем интегрирующее звено.
выходная переменная изменяется с
постоянной скоростью, следовательно,
мы имеем интегрирующее звено.
Запишем уравнение математической модели интегрирующего звена - скорость изменения выходной переменной пропорционально входному сигналу
![]() или
в приращениях
или
в приращениях
![]()
С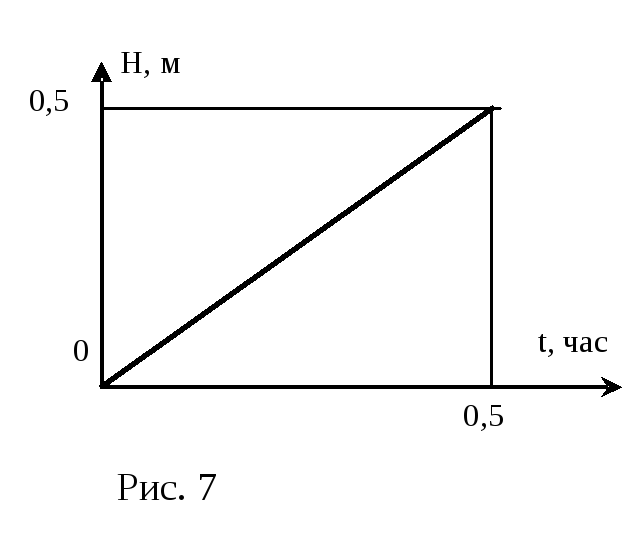 огласно
графику,
огласно
графику,![]() ,
тогда
,
тогда .
.
Тогда
передаточная функция объекта управления
![]() .
Полученное значение коэффициента
совпадает с исходными данными
.
Полученное значение коэффициента
совпадает с исходными данными![]() .
.
Математическая модель реального интегрирующего элемента
Р еальное
интегрирующее звено имеет переходной
процесс с постепенным выходом на
постоянную скорость роста выходного
сигнала (линия 2 на рис. 8) по отношению
с переходным процессом идеального
интегрирующего звена (линия 1 на рис.
8). Такой переходной процесс имеет
электрический привод, вследствие
постепенного увеличения его скорости
при включении.
еальное
интегрирующее звено имеет переходной
процесс с постепенным выходом на
постоянную скорость роста выходного
сигнала (линия 2 на рис. 8) по отношению
с переходным процессом идеального
интегрирующего звена (линия 1 на рис.
8). Такой переходной процесс имеет
электрический привод, вследствие
постепенного увеличения его скорости
при включении.
Передаточная
функция реального интегрирующего звена
имеет вид
![]() .
.
Данное звено можно представить в виде последовательно включенных звеньев первого порядка и идеального интегрирующего звена (рис. 9).
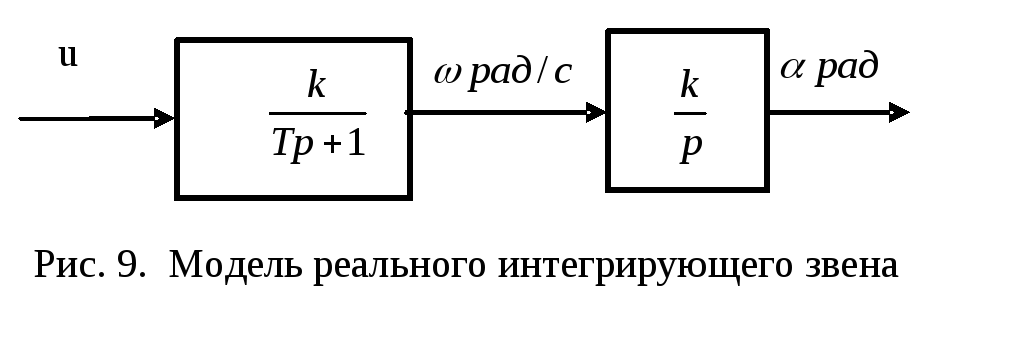
Тогда
определению подлежат параметры
![]() и
и![]() звена
первого порядка. Найдем значения данных
параметров на основании экспериментальной
переходной кривой изменения скорости
двигателя при его включении по
рассмотренной выше методике построения
модели первого порядка.
звена
первого порядка. Найдем значения данных
параметров на основании экспериментальной
переходной кривой изменения скорости
двигателя при его включении по
рассмотренной выше методике построения
модели первого порядка.
Пусть
при включении двигателя на напряжение![]() двигатель в течение
двигатель в течение![]() по экспоненциальной кривой набрал
скорость
по экспоненциальной кривой набрал
скорость![]() ,
что соответствует угловой скорости
,
что соответствует угловой скорости![]() (рис. 10).
(рис. 10).
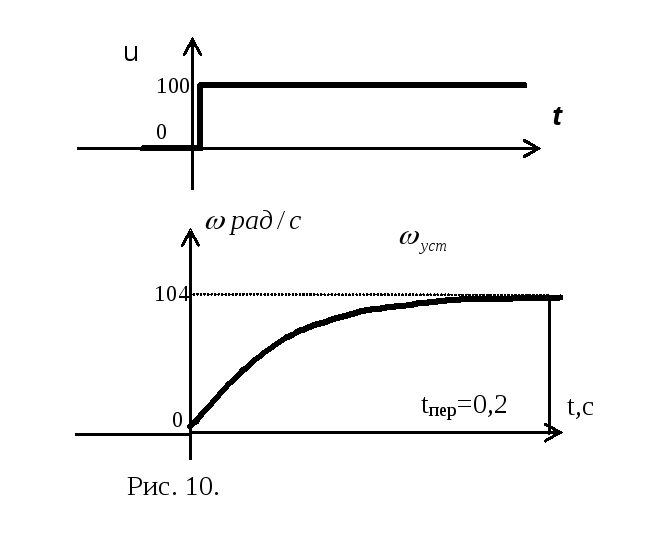 Тогда
коэффициент передачи от напряжения на
скорость равен
Тогда
коэффициент передачи от напряжения на
скорость равен![]() .
.
Постоянную времени оценим по времени переходного процесса
![]() .
.
Передаточная функция по скорости
![]() .
.
Угол поворота выходного вала является интегралом от скорости
![]() .
Следовательно, чтобы преобразовать
скорость выходного вала в угол поворота
выходного вала следует добавить
интегрирующее звено, что и показано на
рис. . Передаточная функция от напряжения
на угол поворота выходного вала
.
Следовательно, чтобы преобразовать
скорость выходного вала в угол поворота
выходного вала следует добавить
интегрирующее звено, что и показано на
рис. . Передаточная функция от напряжения
на угол поворота выходного вала![]() .
.