

Практическая работа 2 по тау для специальности тмс Построение математических моделей элементов и структурной схемы системы управления
Постановка задачи. Построить математические модели элементов, составить структурную схему системы.
Основы построения математических моделей элементов систем управления
Для анализа систем управления используются математические модели элементов систем управления в виде дифференциальных уравнений, передаточных функций. В данной работе используются простые динамические звенья: безинерционное, апериодическое звено первого порядка, интегрирующее звено, колебательное звено. Математические модели строятся в виде передаточных функций, которые находятся на основании паспортных данных элементов системы или на основании мысленных экспериментов и условных кривых переходных процессов.
Построение математической модели апериодического звена 1 порядка
Модели первого порядка используются для описания многих инерционных звеньев с одним доминирующим корнем. Например, для описания объектов управления с большой инерционностью, фильтрацией высокочастотных и среднечастотных сигналов и экспоненциальным переходным процессом.
Передаточная функция апериодического звена первого порядка
![]()
имеет два параметра: коэффициент передачи kи постоянную времениТ.
Коэффициент
передачи
![]() определяется на основании статической
характеристики элемента. Постоянная
времени
определяется на основании статической
характеристики элемента. Постоянная
времени![]() – на основании паспортных данных о
величине времени выхода выходной
переменной на установившееся значение
при ступенчатом изменении входного
сигнала.
– на основании паспортных данных о
величине времени выхода выходной
переменной на установившееся значение
при ступенчатом изменении входного
сигнала.
П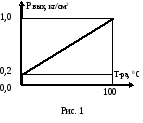 ример1:
Пусть для измерения регулируемой
переменной используется датчик
температуры с пневматическим выходным
сигналом.
ример1:
Пусть для измерения регулируемой
переменной используется датчик
температуры с пневматическим выходным
сигналом.
Диапазон изменения температуры датчика составляет 0-1000С, диапазон изменения выходного сигнала датчика 0,2-1,0 кгс/см2. Статическая характеристика имеет вид, показанный на рис. 1.
Коэффициент передачи датчика
![]()
Пусть в паспорте указано время выхода на установившееся значение
![]() Тогда
из известного соотношения, что время
вхождения экспоненты в 5%-ный коридор
от нового значения составляет
Тогда
из известного соотношения, что время
вхождения экспоненты в 5%-ный коридор
от нового значения составляет
![]() постоянная времени элемента равна
постоянная времени элемента равна
Тогда
передаточная функция будет иметь вид
![]()

Статическая характеристика ПТТП имеет вид, представленный на рис. 2.
К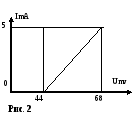 оэффициент
передачи равен
оэффициент
передачи равен![]()
При
времени переходного процесса
![]()
передаточная
функция будет иметь вид
![]()
П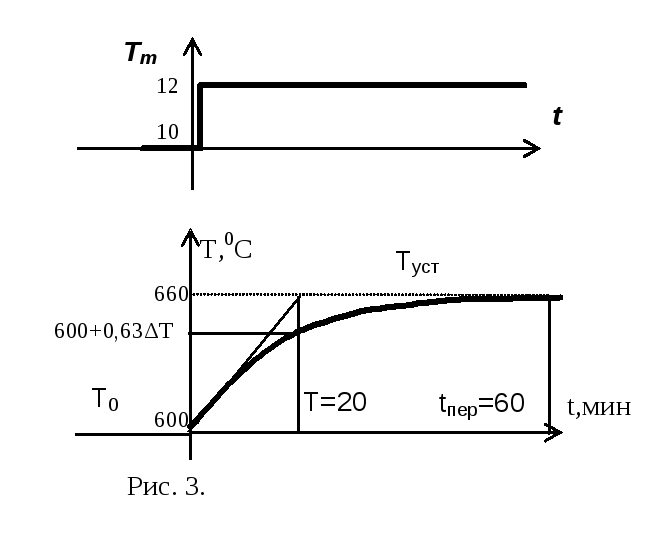 ример
3. Построение
модели инерционного звена на основе
экспериментальной кривой переходного
процесса. Построим математическую
модель камеры для нагрева заготовок.
Нагрев камеры производится электрическими
нагревательными элементами. При изменении
тока нагревательных элементов с
ример
3. Построение
модели инерционного звена на основе
экспериментальной кривой переходного
процесса. Построим математическую
модель камеры для нагрева заготовок.
Нагрев камеры производится электрическими
нагревательными элементами. При изменении
тока нагревательных элементов с
![]() до
до![]() температура в камере изменилась с
начальной температуры
температура в камере изменилась с
начальной температуры![]() до
до![]() по графику, приведенному на рис. 3.
по графику, приведенному на рис. 3.
Переходной
процесс экспоненциальный, следовательно,
можно использовать модель первого
порядка
 .
.
Находим
коэффициент передачи объекта управления
по отношению приращений выходной
величины к входной
 .
.
Постоянную времени можно определить тремя способами.
Первый
вариант
согласно методике, описанной выше
 .
.
Полученная
передаточная функция
 .
.
Второй
вариант
определения постоянной времени –
провести касательную к кривой переходного
процесса в начале координат, пересечение
касательной линии установившегося
значения происходит через время
![]() .
.
Третий
вариант
определения постоянной времени –
провести горизонтальную времени на
уровне 63% от приращения выходной
переменной. Эта линия пересечет линию
переходного процесса также при
![]() .
.
Пример 4. Построение модели объекта управления системы регулирования температуры в реакторе. Имеется реактор идеального смешения с рубашкой (рис. 4). Необходимо построить передаточную функцию по каналу: температура воды в рубашке - температура реагента на выходе реактора. Параметры процесса:
Рис.
4
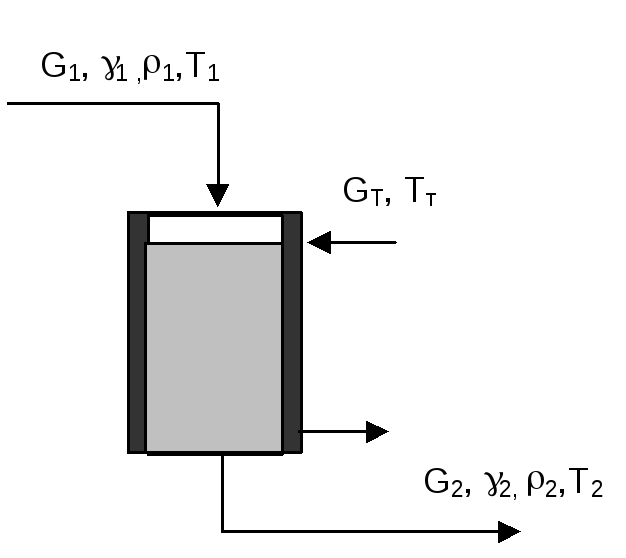
![]() -
соответственно, объемный расход реагентов
на входе и выходе реактора,
-
соответственно, объемный расход реагентов
на входе и выходе реактора,
![]() -
температура реагентов на входе, выходе
и теплоносителя в рубашке,
-
температура реагентов на входе, выходе
и теплоносителя в рубашке,
![]() -
теплоемкости и плотности реагентов на
входе и выходе реактора.
-
теплоемкости и плотности реагентов на
входе и выходе реактора.
Запишем уравнение теплового баланса, считая, что за счет интенсивного перемешивания, температура реагента в реакторе во всех точках одинакова.
Изменение
количества тепла в реакторе за время
![]() равно
равно

Переобозначим переменные
![]()
![]()
Разделим все члены на коэффициент при выходной переменной
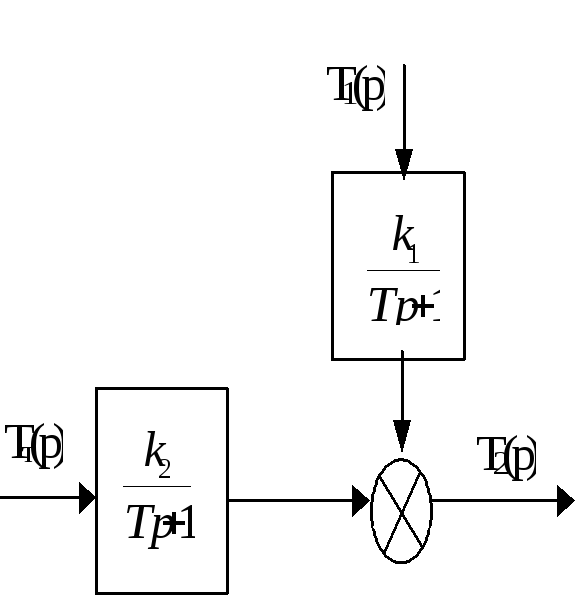
Рис.
5
![]() Обозначим
Обозначим
![]()
Тогда
![]() .
.
Преобразуем уравнение по Лапласу и получим передаточные функции
![]()
Структурная схема объекта управления приведена на рис. 5. Таким образом, объекты теплопередачи могут быть описаны дифференциальным уравнением первого порядка по каждому каналу теплопередачи.
По
каналу: температура реагента на входе
- температура реагента на выходе реактора
![]() .
.
По
каналу: температура теплоносителя в
рубашке - температура реагента на выходе
реактора
![]() .
.
Нахождение значений параметров моделей можно произвести на основании полученных выражений. Более точно можно определить параметры моделей на основании экспериментальных переходных кривых изменения температуры на выходе емкости при ступенчатом изменении температуры на входе или температуры теплоносителя в рубашке емкости по рассмотренной выше методике построения модели апериодического звена первого порядка.