

15. Определение показателей качества переходных процессов.
![]()
15.1 Определение весовой функции.
![]()
![]()
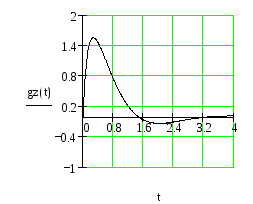
Рис.37 Весовая функция.
15.2 Определение переходной функции.
![]()
![]()

Рис.38 Переходная функция.
По графику получим время переходного процесса tпп= 1,03 сек.
16. Заключение
В результате включения в схему корректирующего элемента мы добились уменьшения ошибки и времени переходного процесса.
В исходной системе ошибка составляла по задающему воздействию 5,2 и по возмущающему воздействию 4,2, а время переходного процесса tпп=8,9c.
После включения корректирующего устройства в схему ошибка по задающему воздействию составила 0,2604 т.е. уменьшилась в 19,96 раза, по возмущающему воздействию ошибка составила 0,2083 т.е. уменьшилась в 20,16 раза, а время переходного процесса уменьшилось до tпп=1.03cт.е. быстродействие увеличилось в 8,64 раза.
В результате проведенного синтеза мы добились заданных требований указанных в задании.
Список литературы.
М.А. Боровиков, М.В. Петрова, Теория автоматического управления, Ульяновск, УлГТУ 2004.
В.Н. Тюкин, Теория управления: Часть 2.Вологда: ВоГТУ, 2000.
Н.Б. Культин, Самоучитель MathCAD., СПб.: БХВ - Петербург, 2004.