

8. Определение показателей качества переходных процессов
Переходные процессы нужно получить как реакцию системы на единичные ступенчатые задающее и возмущающее воздействия при нулевых начальных значениях выходных величин всех динамических звеньев.
Поскольку время переходных процессов при отработке задающего и возмущающего воздействий заранее не известно, необходимо выполнить несколько предварительных (пробных) сеансов моделирования переходных процессов только по задающему воздействию, назначая время наблюдения в пределах от 5 до 25 секунд и более. При этом возмущающее воздействие принимается равным нулю.
Определив время переходного процесса по задающему воздействию, можно назначить значения параметров блока, моделирующего скачок возмущения: начальное значение принять равным нулю, конечное значение (величину скачка) - единице, а момент скачка задается непосредственно после окончания переходного процесса по задающему воздействию.
При совмещенном моделировании переходных процессов по задающему и возмущающему воздействиям время наблюдения рекомендуется ориентировочно принять равным удвоенному времени переходного процесса по задающему воздействию.
После отработки параметров режима моделирования зафиксировать график переходного процесса.
8.1 Определение весовой функции.
Для построения графика примем
![]()
![]()
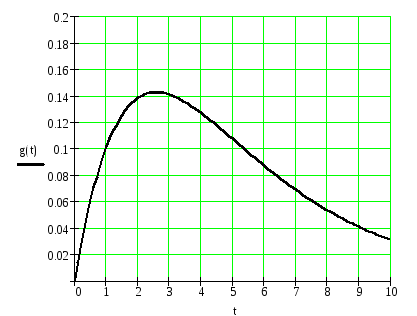
Рис 15. Весовая функция
8.2 Определение переходной функции.
![]()
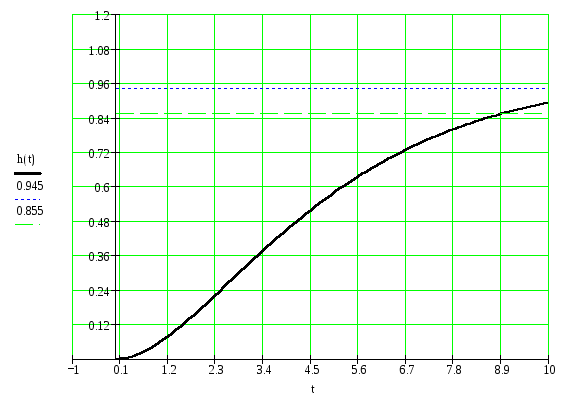
Рис 16 График переходной функции
По графику переходной функции время переходного процесса. Получим tпп=8.9 сек
Определим частоту среза Wср по формуле:
![]()
![]()
II. Синтез корректирующего элемента
9. Расчет корректирующего элемента
8.1 Построение ЛАХ САУ для разомкнутой системы.
Для определения корректирующего элемента разложим передаточную функцию Wр(s) на передаточные функции элементарных звеньев. Построим для каждого из них ЛАХ.
Имеем передаточную функцию разомкнутой САУ:

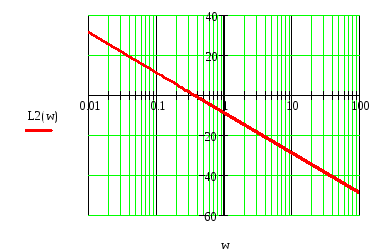
- апериодическое звено первого порядка
![]()
![]()
![]()
![]()
![]()
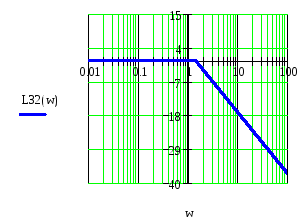
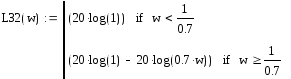
идеальное
дифференцирующее
апериодическое
1-го порядка
![]()
![]()
![]()

![]()
![]()
![]()
Путем сложения ЛАХ каждого элементарного звена получим ЛАХ САУ в разомкнутом состоянии.
![]()
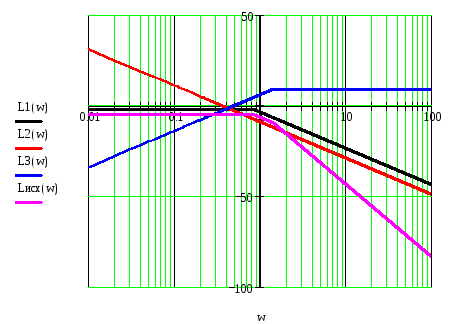
![]()
Рис.17 Исходная ЛАХ САУ для разомкнутой системы.
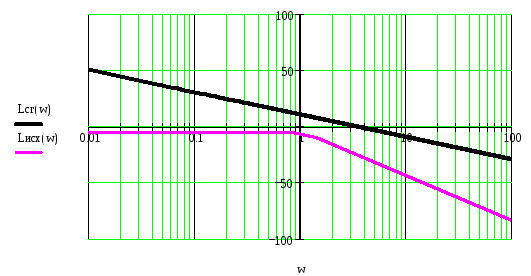
8.2 Построение желаемой ЛАХ и ЛАХ корректирующего элемента.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
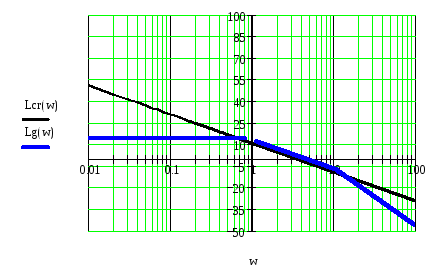
Рис.18 ЛАХ САУ желаемая.
Определим ЛАХ корректирующего элемента как разность между ЛАХ желаемой и исходной системы.
![]()

Рис.19 ЛАХ корректирующего элемента.
Получив ЛАХ корректирующего элемента, определим, по ней выражение передаточной функции и значения ее параметров.
График ЛАХ корректирующего элемента соответствует дифференцирующему типовому звену, и уравнение передаточной функции данного звена имеет вид.
![]()
![]()
![]()
![]()
![]()